Ergonomia stanowisk pracy i algorytmy walki obiecujących pojazdów opancerzonych
W poprzednich artykułach omówiliśmy sposoby na zwiększenie świadomości sytuacyjnej załóg pojazdów opancerzonych и konieczność zwiększenia szybkości naprowadzania broni i sprzętu rozpoznawczego. Równie ważnym punktem jest zapewnienie efektywnej intuicyjnej interakcji członków załogi z bronią, czujnikami i innymi systemami technicznymi wozów bojowych.

W tej chwili zawody członków załogi są wysoce wyspecjalizowane – osobne miejsce kierowcy, osobne stanowiska dowódcy i strzelca. Początkowo było to spowodowane rozplanowaniem pojazdów opancerzonych, w tym obrotową wieżą i optycznymi urządzeniami obserwacyjnymi. Wszyscy członkowie załogi mieli dostęp tylko do własnych urządzeń sterujących i obserwacyjnych, nie mogąc pełnić funkcji innego członka załogi.
Podobną sytuację zaobserwowano wcześniej w: lotnictwoJako przykład możemy przytoczyć miejsca pracy pilota i nawigatora-operatora myśliwca-przechwytującego MIG-31 lub śmigłowca bojowego Mi-28N. Przy takim rozplanowaniu przestrzeni roboczej śmierć lub zranienie jednego z członków załogi uniemożliwia misję bojową, nawet proces powrotu do bazy stał się utrudniony.

Obecnie programiści starają się ujednolicić zadania załogi. W dużej mierze ułatwiło to pojawienie się wielofunkcyjnych wyświetlaczy, na których można wyświetlić wszelkie niezbędne informacje z dowolnego sprzętu rozpoznawczego dostępnego na pokładzie.
W ramach tworzenia śmigłowca rozpoznawczego i szturmowego Boeing/Sikorsky RAH-66 Comanche opracowano ujednolicone stanowiska pracy dla pilota i nawigatora-operatora. Ponadto piloci śmigłowca RAH-66 powinni móc sterować większością funkcji pojazdu bojowego bez odrywania rąk od sterów. W śmigłowcu RAH-66 zaplanowano zainstalowanie nahełmowego systemu celowniczego Kaiser-Electronics umożliwiającego wyświetlanie obrazów terenu w podczerwieni (IR) i telewizyjnych z systemów obserwacji przedniej półkuli lub trójwymiarowej cyfrowej mapy terenu na hełmie. zamontowany wyświetlacz, realizujący zasadę „oczy poza kokpitem”. Obecność wyświetlacza na hełmie pozwala pilotować helikopter, a operatorowi broni szukać celów bez patrzenia na deskę rozdzielczą.

Program śmigłowca RAH-66 został zamknięty, ale nie ma wątpliwości, że osiągnięcia uzyskane podczas jego realizacji są wykorzystywane w innych programach do tworzenia zaawansowanych wozów bojowych. W Rosji w śmigłowcu bojowym Mi-28NM realizowane są zunifikowane stanowiska pracy pilota i nawigatora-operatora w oparciu o doświadczenia zdobyte przy tworzeniu śmigłowca bojowego Mi-28UB. Ponadto dla Mi-28NM opracowywany jest hełm pilota z wyświetlaczem obrazu na osłonie twarzy i montowanym na hełmie systemem oznaczania celów, o którym mówiliśmy w poprzednim Artykuł.
Pojawienie się hełmów z możliwością wyświetlania informacji, bezzałogowych wież i zdalnie sterowanych modułów uzbrojenia (DUMV) umożliwi ujednolicenie zadań w naziemnych pojazdach bojowych. Z dużym prawdopodobieństwem w przyszłości można ujednolicić miejsca pracy wszystkich członków załogi, w tym kierowcy. Nowoczesne systemy sterowania nie wymagają mechanicznego połączenia między elementami sterującymi a siłownikami, dzięki czemu do kierowania pojazdem opancerzonym można wykorzystać kompaktową kierownicę lub nawet boczny drążek sterowniczy o niskiej prędkości — precyzyjny joystick.

Według niepotwierdzonych doniesień, możliwość zastosowania joysticka jako zamiennika kierownicy lub dźwigni sterujących rozważano od 2013 roku przy opracowywaniu systemu sterowania czołg T-90MS. Również na obrazie gamepada konsoli do gier Sony Playstation prawdopodobnie wykonany jest panel sterowania bojowego wozu piechoty (BWP) „Kurganets”, ale nie ujawniono, czy ten pilot ma sterować ruchem bojowy pojazd piechoty, czy tylko do kontroli broni.
Tak więc, aby kontrolować ruch zaawansowanych wozów bojowych, można rozważyć opcję za pomocą bocznego, wolno poruszającego się drążka sterującego, a jeśli ta opcja zostanie uznana za niedopuszczalną, wówczas kierownica chowana w stanie nieaktywnym. Domyślnie sterowanie ruchem pojazdu bojowego powinno być aktywne dla kierowcy, ale w razie potrzeby każdy członek załogi powinien mieć możliwość jego zastąpienia. Główną zasadą przy projektowaniu elementów sterowania do wozów bojowych powinna być zasada - „ręce zawsze na sterach”.
Ujednolicone stanowiska pracy dla członków załogi powinny znajdować się w pancernej kapsule odizolowanej od innych przedziałów wozu bojowego, zgodnie z projektem Armata.
Odchylane krzesła montowane na amortyzatorach powinny zmniejszać skutki wibracji i wstrząsów podczas jazdy po nierównym terenie. W przyszłości aktywne amortyzatory mogą być wykorzystywane do eliminowania drgań i wstrząsów. Fotele załogi mogą być wyposażone w wentylację zintegrowaną z wielostrefową klimatyzacją.
Mogłoby się wydawać, że takie wymagania są zbędne, ponieważ czołg to nie limuzyna, ale pojazd bojowy. Ale rzeczywistość jest taka, że czas armii obsadzonych przez niewyszkolonych rekrutów minął na zawsze. Wzrost złożoności i kosztów wozów bojowych wymaga zaangażowania odpowiednich fachowców, którym zależy na zapewnieniu komfortowego miejsca pracy. Biorąc pod uwagę koszt pojazdów opancerzonych, który wynosi około pięciu do dziesięciu milionów dolarów za sztukę, instalacja sprzętu zwiększającego komfort załogi nie wpłynie znacząco na ostateczną kwotę. Z kolei normalne warunki pracy pomogą zwiększyć efektywność załogi, której nie trzeba rozpraszać codziennymi niedogodnościami.
Jednym z najtrudniejszych zagadnień automatyzacji jest zapewnienie efektywnej interakcji człowieka z technologią. To właśnie w tym obszarze mogą wystąpić znaczne opóźnienia w cyklu OODA (obserwacja, orientacja, decyzja, działanie) na etapach „orientacji” i „decyzji”. Aby zrozumieć sytuację (orientację) i podjąć skuteczne decyzje (decyzję), informacje dla załogi powinny być wyświetlane w najbardziej przystępnej i intuicyjnej formie. Wraz ze wzrostem mocy obliczeniowej sprzętu i pojawieniem się oprogramowania (oprogramowania), które wykorzystuje m.in. technologie analizy informacji oparte na sieciach neuronowych, część zadań przetwarzania danych wywiadowczych wykonywanych dotychczas przez człowieka można przypisać oprogramowaniu i systemy sprzętowe.
Na przykład podczas ataku ppk komputer pokładowy pojazdu opancerzonego może samodzielnie analizować obraz z kamery termowizyjnej i kamer pracujących w zakresie ultrafioletu (UV) (ślad silnika rakietowego), dane z radaru i ewentualnie z czujniki akustyczne, wykrywają i przechwytują startowy ppk, wybierają niezbędną amunicję i powiadamiają o tym załogę, po czym porażka obliczeń ppk może być przeprowadzona automatycznie, za pomocą jednego lub dwóch poleceń (odwrócenie broni, strzał).

Elektronika pokładowa zaawansowanych pojazdów opancerzonych powinna być w stanie niezależnie określać potencjalne cele na podstawie ich sygnatur termicznych, UV, optycznych i radarowych, obliczać trajektorię ruchu, klasyfikować cele według stopnia zagrożenia i wyświetlać informacje na ekranie lub w hełm w formie łatwej do zrozumienia. Niewystarczające lub odwrotnie nadmierne informacje mogą prowadzić do opóźnień w podejmowaniu decyzji lub podejmowania błędnych decyzji na etapie orientacji i decyzji.

Wykrycie żołnierza w kamuflażu w zakresie UV
Istotną pomocą w pracy załóg pojazdów opancerzonych może być mieszanie informacji pochodzących z różnych czujników i wyświetlanych na jednym ekranie/warstwie. Innymi słowy, informacje z każdego środka obserwacyjnego umieszczonego na pojeździe opancerzonym powinny być wykorzystane do stworzenia jednego obrazu, który jest jak najbardziej wygodny do percepcji. Na przykład w ciągu dnia obraz wideo z kolorowych kamer o wysokiej rozdzielczości służy jako podstawa do budowania obrazu. Obraz z kamery termowizyjnej służy jako pomocniczy obraz do podświetlania elementów kontrastujących pod wpływem ciepła. Ponadto wyświetlane są dodatkowe elementy obrazu zgodnie z danymi z kamer radarowych lub UV. W nocy obraz wideo z noktowizorów staje się podstawą do budowania obrazu, który jest odpowiednio uzupełniany informacjami z innych czujników.
Podobne technologie są obecnie stosowane nawet w smartfonach z wieloma aparatami, na przykład gdy do poprawy jakości obrazu uzyskiwanej przez kamerę kolorową stosuje się czarno-biały sensor o wyższej światłoczułości. Technologie wyrównywania obrazu są również wykorzystywane do celów przemysłowych. Oczywiście możliwość oglądania obrazów z każdego urządzenia monitorującego z osobna powinna pozostać jako opcja.
Dzięki działaniu pojazdów opancerzonych w grupie, wyprowadzanie informacji może odbywać się z uwzględnieniem danych otrzymywanych przez czujniki sąsiednich pojazdów opancerzonych zgodnie z zasadą „jeden widzi – każdy widzi”. Informacje ze wszystkich czujników umieszczonych na jednostkach rozpoznawczych i bojowych na polu walki powinny być wyświetlane na najwyższym poziomie, przetwarzane i przekazywane do wyższego dowództwa w formie zoptymalizowanej dla każdego konkretnego szczebla decyzyjnego, co zapewni wysoką sprawność dowodzenia i kontroli nad wojsko.
Można przypuszczać, że w zaawansowanych wozach bojowych koszt stworzenia oprogramowania będzie stanowił dużą część kosztów opracowania kompleksu. I to właśnie oprogramowanie w dużej mierze określi przewagę jednego pojazdu bojowego nad innym.
Wyjście obrazu w postaci cyfrowej pozwoli na szkolenie załóg pojazdów opancerzonych bez użycia specjalistycznych symulatorów, bezpośrednio w samym wozie bojowym. Oczywiście takie szkolenie nie zastąpi pełnoprawnego szkolenia strzelaniem z prawdziwej broni, ale i tak znacznie uprości szkolenie załóg. Szkolenie może odbywać się zarówno indywidualnie, gdy załoga pojazdu opancerzonego działa przeciwko AI (sztuczna inteligencja – boty w programie komputerowym), jak i z wykorzystaniem dużej liczby jednostek bojowych różnego typu w obrębie jednego wirtualnego pola walki. W przypadku ćwiczeń wojskowych rzeczywiste pole walki można uzupełnić wirtualnymi obiektami wykorzystującymi technologię rozszerzonej rzeczywistości w oprogramowaniu pojazdów opancerzonych.


Ogromna popularność internetowych symulatorów sprzętu wojskowego sugeruje, że zaawansowane oprogramowanie do szkolenia pojazdów opancerzonych, przystosowane do pracy na konwencjonalnych komputerach, może służyć do wstępnego szkolenia w formie gry dla przyszłego potencjalnego personelu wojskowego. Oczywiście w takim oprogramowaniu należy wprowadzić zmiany, które zapewnią ukrywanie informacji stanowiących tajemnicę państwową i wojskową.
Wykorzystanie symulatorów jako sposobu na zwiększenie atrakcyjności służby wojskowej staje się stopniowo popularnym narzędziem w siłach zbrojnych krajów świata. Według niektórych doniesień, marynarka wojenna Stanów Zjednoczonych używała komputerowej gry symulacyjnej bitwy morskiej Harpoon do szkolenia oficerów. flota już pod koniec XX wieku. Od tego czasu możliwości stworzenia realistycznej wirtualnej przestrzeni wielokrotnie wzrosły, a korzystanie z nowoczesnych wozów bojowych coraz bardziej przypomina grę komputerową, zwłaszcza jeśli chodzi o bezzałogowy (zdalnie sterowany) sprzęt wojskowy.
Załogi obiecujących pojazdów opancerzonych będą mogły podejmować trafne decyzje w złożonym, dynamicznie zmieniającym się środowisku i przeprowadzać ich realizację ze znacznie większą prędkością niż jest to możliwe w istniejących wozach bojowych. Będzie to ułatwione dzięki ujednoliceniu ergonomicznych stanowisk pracy załogi oraz wykorzystaniu inteligentnych systemów przetwarzania i wyświetlania informacji. Wykorzystanie pojazdów opancerzonych jako symulatora pozwoli zaoszczędzić środki finansowe na rozwój i zakup specjalistycznego sprzętu szkoleniowego, zapewni wszystkim załogom możliwość szkolenia w dowolnym momencie w wirtualnej przestrzeni bojowej lub podczas ćwiczeń wojskowych z wykorzystaniem technologii rozszerzonej rzeczywistości.
Można przypuszczać, że wdrożenie powyższych rozwiązań w zakresie zwiększenia świadomości sytuacyjnej, optymalizacji ergonomii kokpitu oraz zastosowania szybkich napędów naprowadzania pozwoli na porzucenie jednego z członków załogi bez utraty skuteczności bojowej, gdyż na przykład możesz połączyć stanowisko dowódcy i strzelca. Jednak dowódcy pojazdu opancerzonego może zostać powierzone kilka innych obiecujących zadań, które omówimy w następnym artykule.

Stanowiska pracy pilota (po lewej) i nawigatora-operatora (po prawej) w kokpicie myśliwca przechwytującego MIG-31
Stanowiska pracy załóg pojazdów opancerzonych
W tej chwili zawody członków załogi są wysoce wyspecjalizowane – osobne miejsce kierowcy, osobne stanowiska dowódcy i strzelca. Początkowo było to spowodowane rozplanowaniem pojazdów opancerzonych, w tym obrotową wieżą i optycznymi urządzeniami obserwacyjnymi. Wszyscy członkowie załogi mieli dostęp tylko do własnych urządzeń sterujących i obserwacyjnych, nie mogąc pełnić funkcji innego członka załogi.
Podobną sytuację zaobserwowano wcześniej w: lotnictwoJako przykład możemy przytoczyć miejsca pracy pilota i nawigatora-operatora myśliwca-przechwytującego MIG-31 lub śmigłowca bojowego Mi-28N. Przy takim rozplanowaniu przestrzeni roboczej śmierć lub zranienie jednego z członków załogi uniemożliwia misję bojową, nawet proces powrotu do bazy stał się utrudniony.

Stanowiska pilota (po lewej) i nawigatora-operatora (po prawej) w kokpicie śmigłowca bojowego Mi-28N
Obecnie programiści starają się ujednolicić zadania załogi. W dużej mierze ułatwiło to pojawienie się wielofunkcyjnych wyświetlaczy, na których można wyświetlić wszelkie niezbędne informacje z dowolnego sprzętu rozpoznawczego dostępnego na pokładzie.
W ramach tworzenia śmigłowca rozpoznawczego i szturmowego Boeing/Sikorsky RAH-66 Comanche opracowano ujednolicone stanowiska pracy dla pilota i nawigatora-operatora. Ponadto piloci śmigłowca RAH-66 powinni móc sterować większością funkcji pojazdu bojowego bez odrywania rąk od sterów. W śmigłowcu RAH-66 zaplanowano zainstalowanie nahełmowego systemu celowniczego Kaiser-Electronics umożliwiającego wyświetlanie obrazów terenu w podczerwieni (IR) i telewizyjnych z systemów obserwacji przedniej półkuli lub trójwymiarowej cyfrowej mapy terenu na hełmie. zamontowany wyświetlacz, realizujący zasadę „oczy poza kokpitem”. Obecność wyświetlacza na hełmie pozwala pilotować helikopter, a operatorowi broni szukać celów bez patrzenia na deskę rozdzielczą.

Kokpit śmigłowca rozpoznawczego i szturmowego Boeing / Sikorsky RAH-66 Comanche
Program śmigłowca RAH-66 został zamknięty, ale nie ma wątpliwości, że osiągnięcia uzyskane podczas jego realizacji są wykorzystywane w innych programach do tworzenia zaawansowanych wozów bojowych. W Rosji w śmigłowcu bojowym Mi-28NM realizowane są zunifikowane stanowiska pracy pilota i nawigatora-operatora w oparciu o doświadczenia zdobyte przy tworzeniu śmigłowca bojowego Mi-28UB. Ponadto dla Mi-28NM opracowywany jest hełm pilota z wyświetlaczem obrazu na osłonie twarzy i montowanym na hełmie systemem oznaczania celów, o którym mówiliśmy w poprzednim Artykuł.
Pojawienie się hełmów z możliwością wyświetlania informacji, bezzałogowych wież i zdalnie sterowanych modułów uzbrojenia (DUMV) umożliwi ujednolicenie zadań w naziemnych pojazdach bojowych. Z dużym prawdopodobieństwem w przyszłości można ujednolicić miejsca pracy wszystkich członków załogi, w tym kierowcy. Nowoczesne systemy sterowania nie wymagają mechanicznego połączenia między elementami sterującymi a siłownikami, dzięki czemu do kierowania pojazdem opancerzonym można wykorzystać kompaktową kierownicę lub nawet boczny drążek sterowniczy o niskiej prędkości — precyzyjny joystick.

Boczny drążek sterowniczy wolnych prędkości w kokpitach samolotów F-22 i F-35
Według niepotwierdzonych doniesień, możliwość zastosowania joysticka jako zamiennika kierownicy lub dźwigni sterujących rozważano od 2013 roku przy opracowywaniu systemu sterowania czołg T-90MS. Również na obrazie gamepada konsoli do gier Sony Playstation prawdopodobnie wykonany jest panel sterowania bojowego wozu piechoty (BWP) „Kurganets”, ale nie ujawniono, czy ten pilot ma sterować ruchem bojowy pojazd piechoty, czy tylko do kontroli broni.
Tak więc, aby kontrolować ruch zaawansowanych wozów bojowych, można rozważyć opcję za pomocą bocznego, wolno poruszającego się drążka sterującego, a jeśli ta opcja zostanie uznana za niedopuszczalną, wówczas kierownica chowana w stanie nieaktywnym. Domyślnie sterowanie ruchem pojazdu bojowego powinno być aktywne dla kierowcy, ale w razie potrzeby każdy członek załogi powinien mieć możliwość jego zastąpienia. Główną zasadą przy projektowaniu elementów sterowania do wozów bojowych powinna być zasada - „ręce zawsze na sterach”.
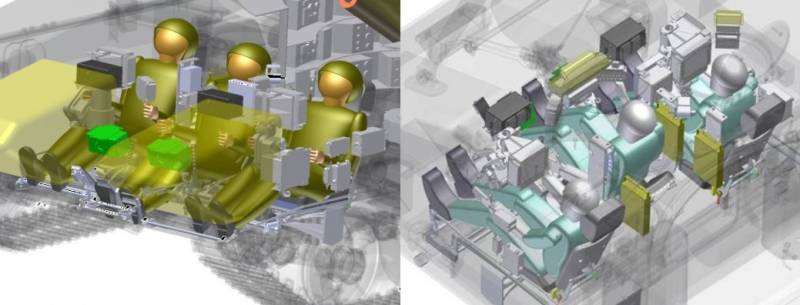
Ujednolicone stanowiska pracy dla członków załogi powinny znajdować się w pancernej kapsule odizolowanej od innych przedziałów wozu bojowego, zgodnie z projektem Armata.
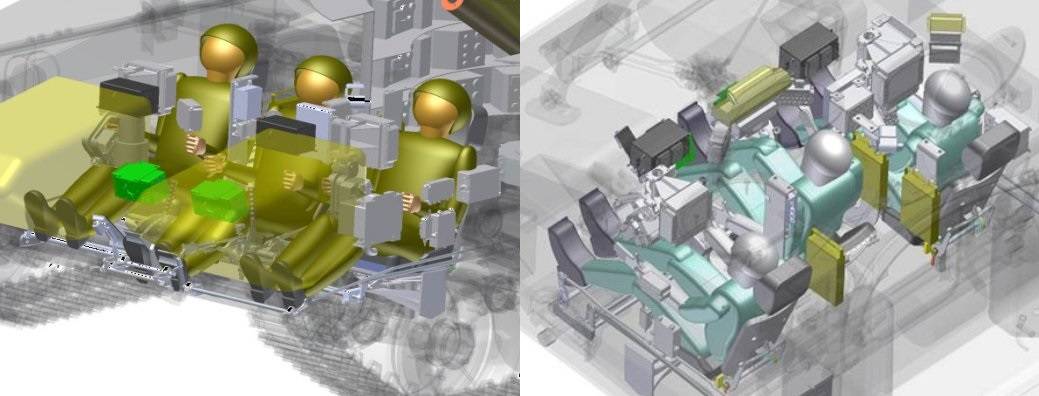
Lokalizacja załogi w projekcie „Armata”
Odchylane krzesła montowane na amortyzatorach powinny zmniejszać skutki wibracji i wstrząsów podczas jazdy po nierównym terenie. W przyszłości aktywne amortyzatory mogą być wykorzystywane do eliminowania drgań i wstrząsów. Fotele załogi mogą być wyposażone w wentylację zintegrowaną z wielostrefową klimatyzacją.
Mogłoby się wydawać, że takie wymagania są zbędne, ponieważ czołg to nie limuzyna, ale pojazd bojowy. Ale rzeczywistość jest taka, że czas armii obsadzonych przez niewyszkolonych rekrutów minął na zawsze. Wzrost złożoności i kosztów wozów bojowych wymaga zaangażowania odpowiednich fachowców, którym zależy na zapewnieniu komfortowego miejsca pracy. Biorąc pod uwagę koszt pojazdów opancerzonych, który wynosi około pięciu do dziesięciu milionów dolarów za sztukę, instalacja sprzętu zwiększającego komfort załogi nie wpłynie znacząco na ostateczną kwotę. Z kolei normalne warunki pracy pomogą zwiększyć efektywność załogi, której nie trzeba rozpraszać codziennymi niedogodnościami.
Orientacja i decyzja
Jednym z najtrudniejszych zagadnień automatyzacji jest zapewnienie efektywnej interakcji człowieka z technologią. To właśnie w tym obszarze mogą wystąpić znaczne opóźnienia w cyklu OODA (obserwacja, orientacja, decyzja, działanie) na etapach „orientacji” i „decyzji”. Aby zrozumieć sytuację (orientację) i podjąć skuteczne decyzje (decyzję), informacje dla załogi powinny być wyświetlane w najbardziej przystępnej i intuicyjnej formie. Wraz ze wzrostem mocy obliczeniowej sprzętu i pojawieniem się oprogramowania (oprogramowania), które wykorzystuje m.in. technologie analizy informacji oparte na sieciach neuronowych, część zadań przetwarzania danych wywiadowczych wykonywanych dotychczas przez człowieka można przypisać oprogramowaniu i systemy sprzętowe.
Na przykład podczas ataku ppk komputer pokładowy pojazdu opancerzonego może samodzielnie analizować obraz z kamery termowizyjnej i kamer pracujących w zakresie ultrafioletu (UV) (ślad silnika rakietowego), dane z radaru i ewentualnie z czujniki akustyczne, wykrywają i przechwytują startowy ppk, wybierają niezbędną amunicję i powiadamiają o tym załogę, po czym porażka obliczeń ppk może być przeprowadzona automatycznie, za pomocą jednego lub dwóch poleceń (odwrócenie broni, strzał).

System obserwacji pod każdym kątem w zakresie ultrafioletowym z kompleksu 101KS Atoll samolotu Su-57 oraz wielospektralna kamera wideo Microvista Intevac o zakresie widzialności 150–1100 nm
Elektronika pokładowa zaawansowanych pojazdów opancerzonych powinna być w stanie niezależnie określać potencjalne cele na podstawie ich sygnatur termicznych, UV, optycznych i radarowych, obliczać trajektorię ruchu, klasyfikować cele według stopnia zagrożenia i wyświetlać informacje na ekranie lub w hełm w formie łatwej do zrozumienia. Niewystarczające lub odwrotnie nadmierne informacje mogą prowadzić do opóźnień w podejmowaniu decyzji lub podejmowania błędnych decyzji na etapie orientacji i decyzji.
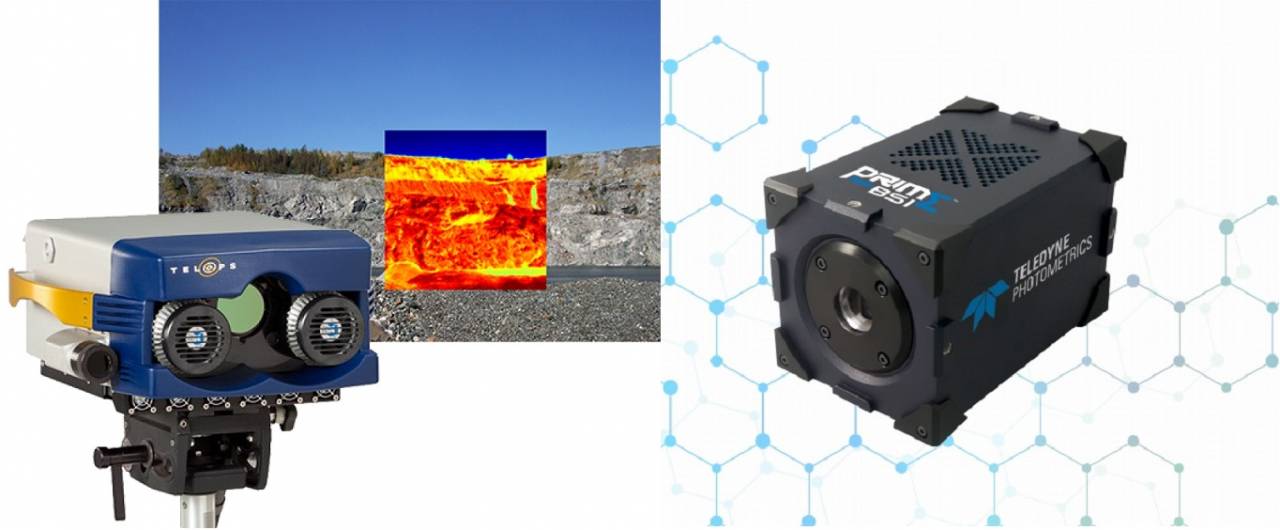
Telops Hyperspectral IR i Prime BSI Kamera sCMOS o wysokiej czułości w ultrafiolecie
Wykrycie żołnierza w kamuflażu w zakresie UV
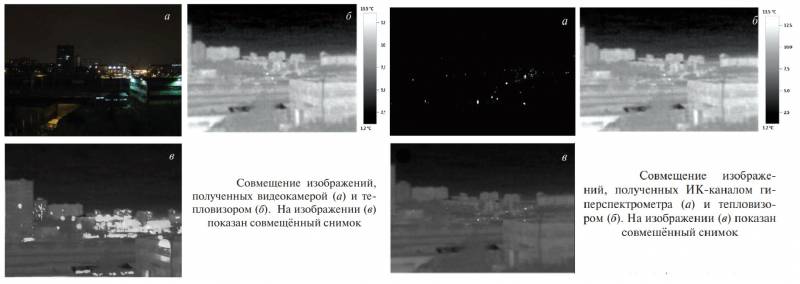
Istotną pomocą w pracy załóg pojazdów opancerzonych może być mieszanie informacji pochodzących z różnych czujników i wyświetlanych na jednym ekranie/warstwie. Innymi słowy, informacje z każdego środka obserwacyjnego umieszczonego na pojeździe opancerzonym powinny być wykorzystane do stworzenia jednego obrazu, który jest jak najbardziej wygodny do percepcji. Na przykład w ciągu dnia obraz wideo z kolorowych kamer o wysokiej rozdzielczości służy jako podstawa do budowania obrazu. Obraz z kamery termowizyjnej służy jako pomocniczy obraz do podświetlania elementów kontrastujących pod wpływem ciepła. Ponadto wyświetlane są dodatkowe elementy obrazu zgodnie z danymi z kamer radarowych lub UV. W nocy obraz wideo z noktowizorów staje się podstawą do budowania obrazu, który jest odpowiednio uzupełniany informacjami z innych czujników.

Połączenie obrazu otrzymanego z różnych czujników przemysłowych
Podobne technologie są obecnie stosowane nawet w smartfonach z wieloma aparatami, na przykład gdy do poprawy jakości obrazu uzyskiwanej przez kamerę kolorową stosuje się czarno-biały sensor o wyższej światłoczułości. Technologie wyrównywania obrazu są również wykorzystywane do celów przemysłowych. Oczywiście możliwość oglądania obrazów z każdego urządzenia monitorującego z osobna powinna pozostać jako opcja.
Dzięki działaniu pojazdów opancerzonych w grupie, wyprowadzanie informacji może odbywać się z uwzględnieniem danych otrzymywanych przez czujniki sąsiednich pojazdów opancerzonych zgodnie z zasadą „jeden widzi – każdy widzi”. Informacje ze wszystkich czujników umieszczonych na jednostkach rozpoznawczych i bojowych na polu walki powinny być wyświetlane na najwyższym poziomie, przetwarzane i przekazywane do wyższego dowództwa w formie zoptymalizowanej dla każdego konkretnego szczebla decyzyjnego, co zapewni wysoką sprawność dowodzenia i kontroli nad wojsko.
Można przypuszczać, że w zaawansowanych wozach bojowych koszt stworzenia oprogramowania będzie stanowił dużą część kosztów opracowania kompleksu. I to właśnie oprogramowanie w dużej mierze określi przewagę jednego pojazdu bojowego nad innym.
szkolenie
Wyjście obrazu w postaci cyfrowej pozwoli na szkolenie załóg pojazdów opancerzonych bez użycia specjalistycznych symulatorów, bezpośrednio w samym wozie bojowym. Oczywiście takie szkolenie nie zastąpi pełnoprawnego szkolenia strzelaniem z prawdziwej broni, ale i tak znacznie uprości szkolenie załóg. Szkolenie może odbywać się zarówno indywidualnie, gdy załoga pojazdu opancerzonego działa przeciwko AI (sztuczna inteligencja – boty w programie komputerowym), jak i z wykorzystaniem dużej liczby jednostek bojowych różnego typu w obrębie jednego wirtualnego pola walki. W przypadku ćwiczeń wojskowych rzeczywiste pole walki można uzupełnić wirtualnymi obiektami wykorzystującymi technologię rozszerzonej rzeczywistości w oprogramowaniu pojazdów opancerzonych.
Symulator załogi czołgu T-90

Symulator załogi czołgu T-72
Ogromna popularność internetowych symulatorów sprzętu wojskowego sugeruje, że zaawansowane oprogramowanie do szkolenia pojazdów opancerzonych, przystosowane do pracy na konwencjonalnych komputerach, może służyć do wstępnego szkolenia w formie gry dla przyszłego potencjalnego personelu wojskowego. Oczywiście w takim oprogramowaniu należy wprowadzić zmiany, które zapewnią ukrywanie informacji stanowiących tajemnicę państwową i wojskową.
Wykorzystanie symulatorów jako sposobu na zwiększenie atrakcyjności służby wojskowej staje się stopniowo popularnym narzędziem w siłach zbrojnych krajów świata. Według niektórych doniesień, marynarka wojenna Stanów Zjednoczonych używała komputerowej gry symulacyjnej bitwy morskiej Harpoon do szkolenia oficerów. flota już pod koniec XX wieku. Od tego czasu możliwości stworzenia realistycznej wirtualnej przestrzeni wielokrotnie wzrosły, a korzystanie z nowoczesnych wozów bojowych coraz bardziej przypomina grę komputerową, zwłaszcza jeśli chodzi o bezzałogowy (zdalnie sterowany) sprzęt wojskowy.
odkrycia
Załogi obiecujących pojazdów opancerzonych będą mogły podejmować trafne decyzje w złożonym, dynamicznie zmieniającym się środowisku i przeprowadzać ich realizację ze znacznie większą prędkością niż jest to możliwe w istniejących wozach bojowych. Będzie to ułatwione dzięki ujednoliceniu ergonomicznych stanowisk pracy załogi oraz wykorzystaniu inteligentnych systemów przetwarzania i wyświetlania informacji. Wykorzystanie pojazdów opancerzonych jako symulatora pozwoli zaoszczędzić środki finansowe na rozwój i zakup specjalistycznego sprzętu szkoleniowego, zapewni wszystkim załogom możliwość szkolenia w dowolnym momencie w wirtualnej przestrzeni bojowej lub podczas ćwiczeń wojskowych z wykorzystaniem technologii rozszerzonej rzeczywistości.
Można przypuszczać, że wdrożenie powyższych rozwiązań w zakresie zwiększenia świadomości sytuacyjnej, optymalizacji ergonomii kokpitu oraz zastosowania szybkich napędów naprowadzania pozwoli na porzucenie jednego z członków załogi bez utraty skuteczności bojowej, gdyż na przykład możesz połączyć stanowisko dowódcy i strzelca. Jednak dowódcy pojazdu opancerzonego może zostać powierzone kilka innych obiecujących zadań, które omówimy w następnym artykule.
- Andriej Mitrofanow
- otvaga2004.ru, airwar.ru, topwar.ru, npovk.ru, sfw.so
- Czołgowe wsparcie ogniowe, BMPT „Terminator” i cykl OODA Johna Boyda
Pojazdy opancerzone przeciwko piechocie. Kto jest szybszy: czołg czy piechota??
Zwiększenie świadomości sytuacyjnej załóg bojowych wozów opancerzonych
informacja