Projekty autonomicznych niezamieszkanych pojazdów podwodnych rodziny Harpsichord

Aby rozwiązać niektóre problemy, można zastosować różne zdalnie sterowane systemy z zestawem niezbędnego sprzętu. W ten sposób autonomiczne niezamieszkane pojazdy podwodne mogą być wykorzystywane do badania dna morskiego i obiektów dennych. Systemy tej klasy są aktywnie rozwijane przez przedsiębiorstwa krajowe. W ostatnich latach kilka podobnych kompleksów zostało stworzonych przez kilka organizacji. Dwie z nich należą do rodziny zwanej „klawesynem”.
ANPA "Klawesyn-1R"
Pierwszym przedstawicielem nowej rodziny był aparat „Klawesyn-1R”. Według dostępnych danych autonomiczny, niezamieszkany pojazd podwodny „Klavesin-1R” został opracowany przez Instytut Problemów Techniki Morskiej Oddziału Dalekowschodniego Rosyjskiej Akademii Nauk (IPMT FEB RAS, Władywostok). Celem projektu było stworzenie specjalnego narzędzia nadającego się do wykonywania różnych zadań na różnych głębokościach. Rozwój prowadzono zarówno w interesie organizacji naukowych, jak i odpowiednich struktur resortu wojskowego. Projekt przewidywał możliwość badania otoczenia i poszczególnych obiektów za pomocą zestawu urządzeń pokładowych. Urządzenie otrzymało zautomatyzowany system sterowania z możliwością odbierania nowych poleceń z centrali.
Bazując na wymaganiach i oczekiwanych funkcjach aplikacji, autorzy projektu wykorzystali sprawdzone pomysły i rozwiązania. W szczególności na zewnątrz produkt "Harpsichord-1R" przypomina torpedę o nieco zwiększonych wymiarach. Wszystkie główne jednostki są umieszczone w cylindrycznym korpusie. Część czołowa aparatu pokryta jest półkulistą owiewką, w rufie znajduje się zwężająca się część, na której znajduje się tzw. kompleks napędowy. Długość Harpsichord-1R wynosi 5,8 m, średnica obudowy 900 mm. Masa urządzenia w powietrzu wynosi 2,5 tony.
ANPA "Harpsichord-1R" posiada solidny korpus, który zapewnia pracę wszystkich jednostek na dużych głębokościach. Cechy konstrukcyjne zapewniają nurkowanie na głębokości do 6 km. Urządzenie wyposażone jest w cztery silniki elektryczne umieszczone na kolumnach części rufowej kadłuba. Każdy z nich kręci własnym śmigłem. Dostępne jednostki napędowe pozwalają na osiągnięcie prędkości do 1,5 m/s (2,9 węzła). Baterie zapewniają zasięg do 300 km.
Pojazd podwodny otrzymał zautomatyzowany system sterowania oprogramowaniem. W ramach przygotowań do zanurzenia się w automatyzacji produktu ładowany jest program, zgodnie z którym praca jest wykonywana w przyszłości. Daje to możliwość korygowania wczytanego programu. W tym celu kompleks sterujący znajdujący się na pokładzie statku transportowego może wykorzystać hydroakustyczny kanał komunikacyjny. Po zaktualizowaniu programu ANPA „Harpsichord-1R” może natychmiast przystąpić do wymaganych działań.

Aparatura do testów. Zdjęcia Svpressa.ru
Na pokładzie pojazdu podwodnego znajduje się zestaw różnego sprzętu przeznaczonego do badania okolicznych obiektów i zbierania niezbędnych informacji. Sonary boczne, szukacz elektromagnetyczny, cyfrowa kamera wideo z narzędziami do przetwarzania sygnału, profiler akustyczny, a także czujniki temperatury i przewodności elektrycznej wody zaburtowej są zamontowane w różnych częściach kadłuba ciśnieniowego.
Głównym sposobem obserwacji otaczającej przestrzeni, zdolnym do pracy w różnych warunkach i służącym do wykrywania różnych obiektów, jest lokalizator hydroakustyczny typu side-scan. Możliwe jest korzystanie z trybów wysokiej i niskiej częstotliwości stacji. Tryb niskiej częstotliwości umożliwia oglądanie pasma o szerokości 800 m. Przy stosowaniu oscylacji wysokiej częstotliwości szerokość pasma zmniejsza się do 200 m.
Inne wyposażenie pokładowe pozwala na dokonywanie różnych pomiarów i określanie parametrów otoczenia. Można również wykonać badanie batymetryczne zbiorników wodnych i ich dna, sondowanie akustyczne dna lub filmowanie wideo wykrytych obiektów. Za pomocą sprzętu pokładowego Harpsichord-1R może zarówno znajdować, jak i badać różne obiekty znajdujące się na dole. Możliwe jest badanie obiektów punktowych i rozszerzonych.

Panel sterowania kompleksu „Klawesyn-1R”. Zdjęcie: IPMT FEB RAS / Imtp.febras.ru
Sterowanie pracą pojazdu podwodnego odbywa się za pomocą pilota znajdującego się na pokładzie statku transportowego. Wyposażenie konsoli pozwala na przeprowadzenie wstępnych przygotowań przed nurkowaniem, w tym wprowadzenie działającego programu, sterowanie pracą wszystkich systemów, pozyskiwanie niektórych danych, a także korygowanie danego programu i przesyłanie zaktualizowanych instrukcji do urządzenia.
Projekt ANPA „Harpsichord-1R” został opracowany w połowie ostatniej dekady i wkrótce został doprowadzony do montażu wyposażenia eksperymentalnego z jego późniejszymi testami. Później prototyp był wykorzystywany w różnych operacjach, których celem było prowadzenie badań lub poszukiwanie określonych obiektów. Wiadomo, że podczas testów prototyp zanurkował w Morzu Japońskim, a także zszedł do głębinowego rowu Kuryl-Kamczatka. Eksperymentalna operacja została przeprowadzona w rejonach Arktyki. Tak więc w 2007 roku aparat Harpsichord-1R stał się częścią aparatury naukowej używanej przez ekspedycję polarną Arktika-2007. Nośnikiem kompleksu stał się atomowy lodołamacz Rossija. Później nowy typ AUV został użyty w operacji poszukiwawczej na Morzu Ochockim. Celem tych prac było poszukiwanie zatopionego źródła radioizotopu.
Pod koniec 2008 r. krajowe media opublikowały szczegóły prac badawczych na morzach arktycznych. Kamera wideo aparatu pozwalała operatorom zobaczyć różnych mieszkańców dna morskiego, z których część później nie mogła zostać zidentyfikowana nawet przez specjalistów. Jednak badanie fauny morskiej nie było zadaniem operatorów kompleksu.
Obraz obiektu uzyskany za pomocą sprzętu Harpsichord-1R. Zdjęcie: IPMT FEB RAS / Imtp.febras.ru
Podczas testów kompleks Harpsichord-1R potwierdził cechy konstrukcyjne, a ponadto poprawił niektóre wskaźniki. Tak więc podczas jednego z nurkowań osiągnięto głębokość 6083 m. W 2008 roku urządzenie przeszło testy stanowe, zgodnie z wynikami których zalecono je do pełnej eksploatacji. Według różnych źródeł autonomiczny, niezamieszkany pojazd podwodny był do tej pory kilkakrotnie wykorzystywany do różnych badań na różnych morzach.
ANPA "Klawesyn-2R-PM"
Prawdopodobnie na podstawie wyników badań i eksploatacji pojazdu podwodnego Harpsichord-1R podjęto decyzję o stworzeniu nowego systemu tej klasy, przeznaczonego do obsługi przez specjalne struktury marynarki wojennej flota. W 2009 roku Ministerstwo Obrony sformułowało wymagania dla nowego AUV i wybrało dewelopera. 19 maja 2009 r. podpisana została umowa pomiędzy resortem wojskowym a Centralnym Biurem Projektowym Inżynierii Morskiej Rubin. Do tej pory nowy projekt został doprowadzony do etapu testów na morzu.
Drugi projekt autonomicznego niezamieszkałego pojazdu podwodnego nazwano „Harpsichord-2R-PM”. Według doniesień nowy rozwój ma te same cele i zadania, co jego poprzednik. Jednocześnie AUV drugiego modelu powinien różnić się nieco zwiększonymi wymiarami i innym składem wyposażenia pokładowego. Dzięki temu możliwe staje się zwiększenie efektywności poszukiwań i badań dna morskiego.

Widok ogólny ANPA "Harpsichord-2R-PM". Zdjęcia Hisutton.com
Istnieje kilka informacji na temat konstrukcji urządzenia „Harpsichord-2R-PM”. Zgodnie z tymi danymi, główną jednostką produktu jest prostokątna rama przeznaczona do montażu wszystkich głównych systemów. Montuje się na nim sprzęt elektroniczny, elektrownię, bloki wypornościowe itp. Rufa ma również zespół napędowy, składający się z czterech silników ze śmigłami. Ochrona przed wodą odbywa się za pomocą wytrzymałej obudowy. Kadłub ma kształt cylindryczny z opływowym dziobem i rufą. Na górnej powierzchni kadłuba przewidziana jest nadbudowa wystająca o dużej długości i niewielkiej wysokości.
Długość AUV „Harpsichord-2R-PM” sięga 6,5 m, średnica kadłuba wynosi 1 m. Masa około 3,7 t. Parametry prędkości urządzenia, według różnych źródeł, są w przybliżeniu równe charakterystyce jego poprzednika. Jednocześnie zasięg został zmniejszony do 50 km. Wytrzymałość kadłuba pozwala na nurkowanie na głębokość 6 km. Kilka miesięcy temu poinformowano, że urządzenie było już w stanie nurkować na głębokość 500 m.
Dokładny skład wyposażenia pokładowego nowego pojazdu podwodnego nie jest znany. Prawdopodobnie postanowiono zachować ogólną architekturę poprzedniego projektu, ale jednocześnie zwiększyć wydajność pracy, wykorzystując wyposażenie nowych modeli o ulepszonych właściwościach. Zapowiadany jest również wzrost autonomii w porównaniu z AUV Harpsichord-1R. Takie dane mogą wskazywać na zachowanie dotychczasowych zasad zarządzania, dzięki czemu prace powinny być prowadzone według gotowego programu z możliwością jego dostosowania w dowolnym momencie.

Nowe urządzenie z różnych perspektyw. Zdjęcia Hisutton.com
Do tej pory przetestowano eksperymentalny sprzęt typu "Harpsichord-2R-PM". Rozpoczęcie kontroli poprzedziło pojawienie się dokumentów ujawniających szczegóły projektu. W szczególności w lutym br. Centralne Biuro Konstrukcyjne MT Rubin ogłosiło zapytanie ofertowe na ubezpieczenie nowego typu sprzętu doświadczalnego. Miesiąc później planowano wybrać firmę, która miała ubezpieczyć dwa eksperymentalne pojazdy podwodne. W dokumencie wskazano również, że budowa sprzętu odbywała się w Petersburgu, a testy planowane są w Petersburgu i na Krymie nad Morzem Czarnym. Ubezpieczona wartość jednego AUV „Harpsichord-2R-PM” została określona na 300 mln rubli.
Na początku czerwca 2016 roku kierownictwo Centralnego Biura Projektowego MT Rubin poinformowało o zbliżającym się zakończeniu prac nad nowym projektem. Z opublikowanych danych wynikało, że do tej pory prototypy zostały przetestowane i są testowane na Morzu Czarnym. Zauważono również, że na tym etapie testów Harpsichord-2R-PM będzie w stanie osiągnąć głębokość około 500 m. Nurkowanie na duże głębokości na używanym poligonie czarnomorskim jest po prostu niemożliwe.
W dającej się przewidzieć przyszłości specjaliści z przemysłu i marynarki wojennej będą musieli wykonać wszystkie niezbędne prace nad projektem Harpsichord-2R-PM. Następnie sprzęt eksperymentalny, po przejściu testów państwowych, może zostać przyjęty przez marynarkę wojenną. Wcześniej w domenie publicznej pojawiły się informacje o możliwym wykorzystaniu nowej technologii. Autonomiczne niezamieszkane pojazdy podwodne zostaną włączone do wyposażenia pokładowego nuklearnych okrętów podwodnych modernizowanych w ramach projektu 949AM. Ponadto staną się stałym narzędziem do badania sytuacji nuklearnego okrętu podwodnego specjalnego przeznaczenia BS-64 „Podmoskoje” projektu 09787.
***
Rozwój obiecujących autonomicznych pojazdów podwodnych umożliwia wyposażenie floty i organizacji naukowych w nowe kompleksy zdolne do prowadzenia obserwacji i rozpoznania w różnych regionach Oceanu Światowego na różnych głębokościach. Zapewniona jest możliwość monitorowania sytuacji za pomocą radarów hydroakustycznych, a także innego sprzętu. Przy zbliżaniu się do minimalnej odległości nowe urządzenia mogą korzystać z kamer wideo. Ważną zaletą nowych rozwiązań krajowych jest możliwość autonomicznej pracy bez stałej kontroli przewoźnika.
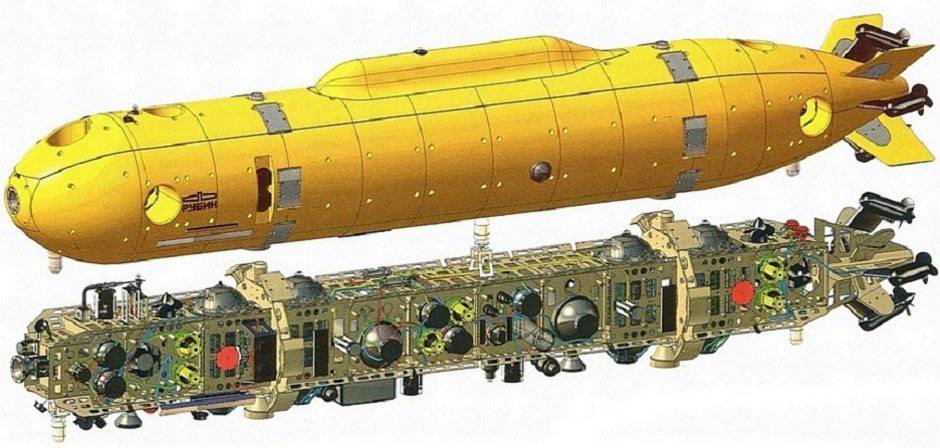
Szacowana architektura urządzenia „Harpsichord-2R-PM”. Rysunek Hisutton.com
Do tej pory jedno z urządzeń z rodziny klawesynów przeszło wszystkie niezbędne testy i zostało zarekomendowane do pełnej eksploatacji. Obecnie testowane są dwa prototypy ANPA „Klavesin-2R-PM”, które w przyszłości określą ich prawdziwą przyszłość. Jeśli nie ma poważnych problemów i utrzymane jest odpowiednie tempo, testy można zakończyć w ciągu najbliższych kilku miesięcy. Dzięki temu w niedalekiej przyszłości marynarka wojenna będzie mogła otrzymać nowy sprzęt specjalny, ułatwiający rozwiązywanie niektórych zadań specjalnych. Jednak ze względu na specyficzne przeznaczenie nowej technologii szczegóły jej działania na długo pozostaną tajemnicą.
Na podstawie materiałów z witryn:
http://imtp.febras.ru/
http://ckb-rubin.ru/
http://i-mash.ru/
http://tass.ru/
http://hisutton.com/
informacja