Wielomodowy hipersoniczny bezzałogowy statek powietrzny Molot

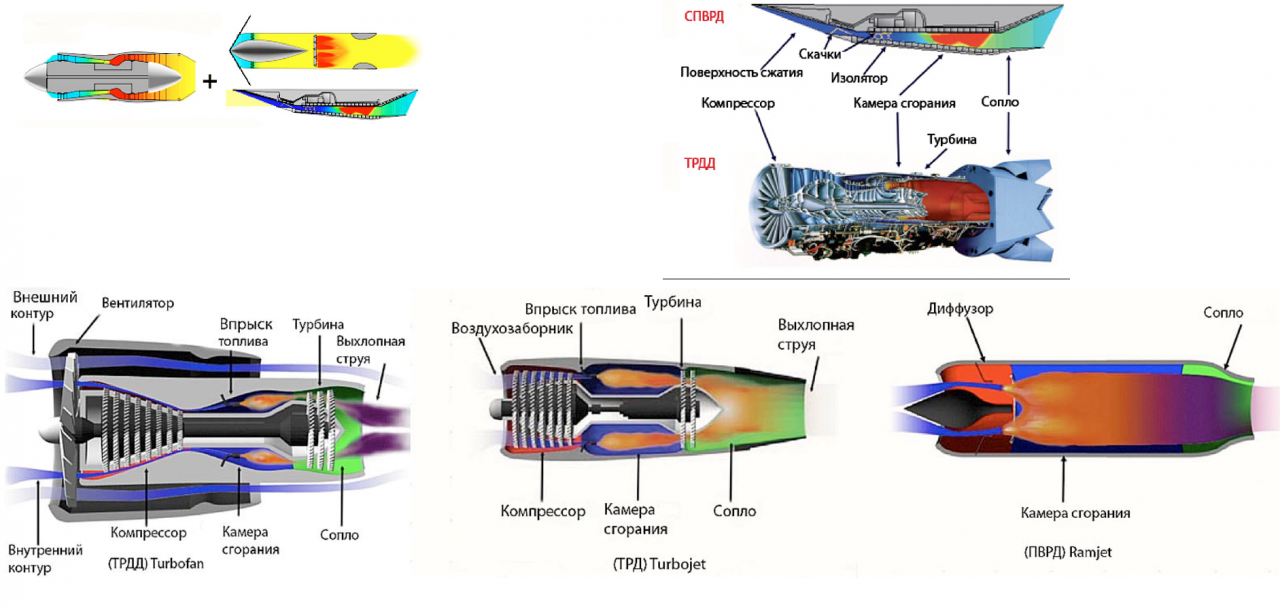
Obecnie NPO Molniya OJSC opracowuje wielomodowy hipersoniczny bezzałogowy statek powietrzny na temat pracy badawczej Molot. Ten bezzałogowy statek powietrzny jest uważany za prototyp-demonstrator technologii dla hipersonicznego bezzałogowego samolotu przyspieszającego z połączonym ekranem turboodrzutowym układem napędowym. Kluczową technologią prototypu jest zastosowanie silnika strumieniowego (ramjet) z poddźwiękową komorą spalania i sitowym urządzeniem dolotowym.
Obliczenia i parametry eksperymentalne prototypu demonstratora:
- przelotowe liczby Macha M = 1.8… 4
- wysokości lotu od niskich do H = 20 000 m,
- masa lotu do 530 kg.
- start naziemny z wyrzutni za pomocą solidnego miotacza miotającego.

Prehistorią tych badań był projekt wielotrybowego naddźwiękowego bezzałogowego statku powietrznego (MSUA) opracowanego przez OAO NPO Molniya, który określił aerodynamiczny wygląd obiecującego bezzałogowego lub załogowego samolotu przyspieszającego. Kluczową technologią MUAV jest zastosowanie silnika strumieniowego (strumieniowego) z poddźwiękową komorą spalania i wlotem powietrza z ekranem. Parametry konstrukcyjne MSUA to: przelotowe liczby Macha M = 1.8…4, wysokości lotu od niskich do H ≈ 20 000 m, masa startowa do 1000 kg.
Badany na stanowisku TsAGI SVS-2 układ wlotów powietrza wykazał niską sprawność zastosowanej brzusznej przesłony klinowej, wykonanej „w tym samym czasie” z kadłubem (rys. A) i prostokątną przesłoną o rozpiętości równej szerokości kadłuba ( Rys. B).

Obydwa zapewniały przybliżoną stałość współczynników odzysku ciśnienia ν i natężenia przepływu f wzdłuż kąta natarcia zamiast ich zwiększania.
Ponieważ przednia osłona typu zastosowanego w rakiecie Kh-90 nie nadawała się dla MUA jako prototyp samolotu przyśpieszającego, na podstawie badań eksperymentalnych TsAGI we wczesnych latach 80. postanowiono opracować osłonę brzuszną, zachowanie konfiguracji z dwustopniowym korpusem centralnym uzyskanym zgodnie z wynikami badań.
W trakcie dwóch etapów badań doświadczalnych na specjalnym stanowisku SVS-2 TsAGI, grudzień 2008 – luty 2009 i marzec 2010, z pośrednim etapem numerycznych badań eksploracyjnych, opracowano ekranowy wlot powietrza (EVZU) z dwoma -stopniowy korpus stożkowy o różnych liczbach konstrukcyjnych stopni Macha, co umożliwiło uzyskanie akceptowalnego ciągu w szerokim zakresie liczb Macha.

Efektem ekranu jest zwiększenie współczynników przepływu i powrotu wraz ze wzrostem kąta natarcia przy liczbach Macha M >2.5. Wielkość dodatniego gradientu obu charakterystyk wzrasta wraz ze wzrostem liczby Macha.

EVZU został po raz pierwszy opracowany i użyty w eksperymentalnym samolocie naddźwiękowym X-90 opracowanym przez NPO Raduga (pocisk wycieczkowy, zgodnie z klasyfikacją NATO AS-19 Koala)

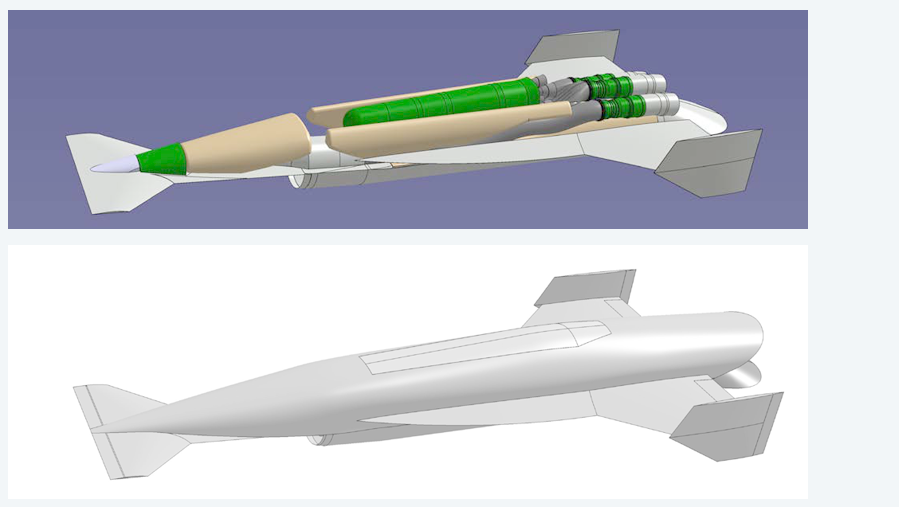
W rezultacie aerodynamiczna konfiguracja prototypu została opracowana zgodnie ze schematem „hybrydowym” nazwanym przez autorów wraz z integracją EVZU z systemem nośnym.
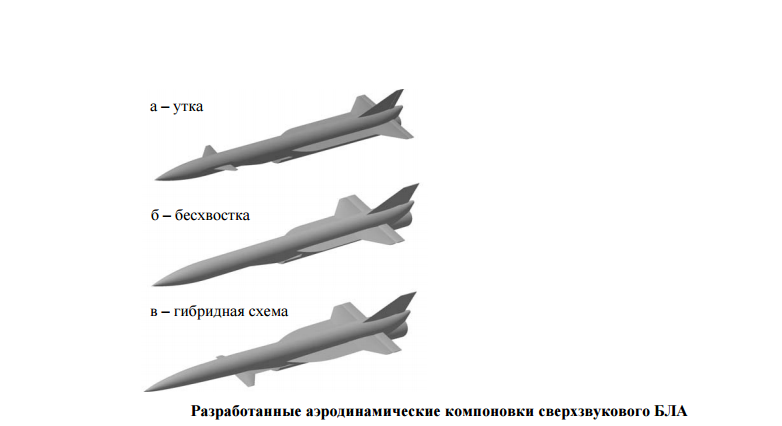
Schemat hybrydowy ma cechy zarówno schematu „kaczki” (według liczby i lokalizacji powierzchni nośnych), jak i schematu „bezogonowego” (według rodzaju kontroli wzdłużnych). Typowa trajektoria MUAV obejmuje start z wyrzutni naziemnej, przyspieszenie za pomocą rakiety na paliwo stałe do naddźwiękowej prędkości startu silnika strumieniowego, lot zgodnie z danym programem z przekrojem poziomym oraz spowolnienie do niskiej prędkości poddźwiękowej z miękkim lądowanie na spadochronie.
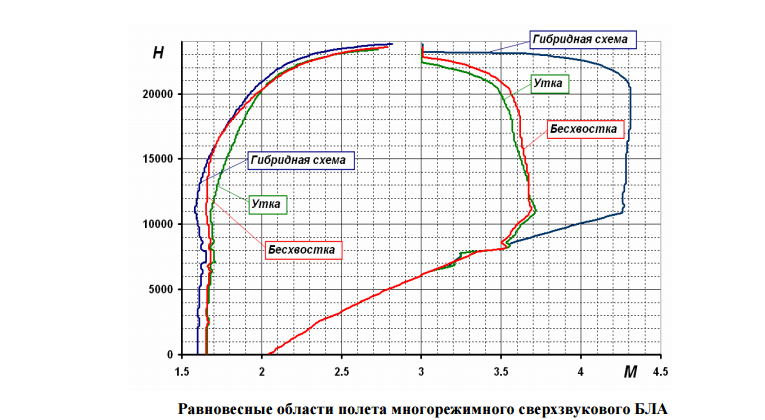
Widać, że układ hybrydowy, ze względu na większy efekt ekranowy i optymalizację układu aerodynamicznego dla minimalnego oporu przy α = 1.2°…1.4°, realizuje znacznie wyższe maksymalne liczby Macha w locie M ≈ 4.3 w szerokim zakresie wysokości W = 11…21 km. Schematy „kaczka” i „bezogonowa” osiągają maksymalną wartość liczby M = 3.72 ... 3.74 na wysokości H = 11 km. Jednocześnie schemat hybrydowy ma niewielki zysk ze względu na przesunięcie minimalnego oporu nawet przy niskich liczbach Macha, przy zakresie numerów lotów M = 11 ... 1.6 na wysokości H ≈ 4.25 km. Najmniejszy obszar lotu równowagi realizowany jest w schemacie „kaczka”.
W tabeli przedstawiono obliczone dane osiągów lotu dla opracowanych układów dla typowych torów lotu.
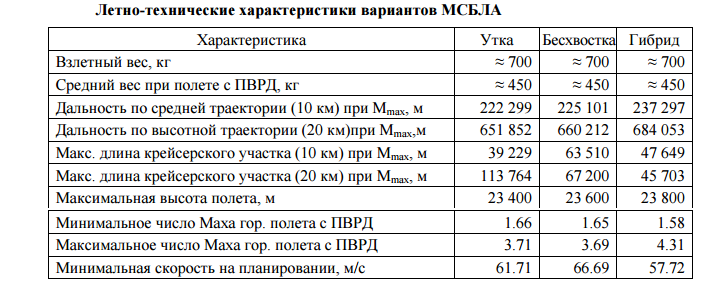
Zasięgi lotów, na tym samym poziomie dla wszystkich wariantów MUA, wykazały możliwość pomyślnego stworzenia przyśpieszającego samolotu z nieco zwiększonym względnym zapasem paliwa naftowego o naddźwiękowych zasięgach lotu rzędu 1500–2000 km na powrót do domu lotnisko. Jednocześnie opracowany układ hybrydowy, będący konsekwencją głębokiej integracji schematu aerodynamicznego i wlotu powietrza na ekranie silnika strumieniowego, miał wyraźną przewagę pod względem maksymalnych prędkości lotu i zakresu wysokości, w którym osiągane są prędkości maksymalne. Bezwzględne wartości liczby Macha i wysokości lotu, osiągające Mmax = 4.3 przy Hmax Mmax = 20 m, pozwalają mówić o wykonalności na poziomie istniejących w Rosji technologii wielokrotnego użytku systemu lotniczego z hipersonicznym samolot wspomagający wysokość, który zmniejsza wagę, a tym samym koszt przestrzeni jednorazowej, etap o 500-6 razy w porównaniu do startu z ziemi.
Ten aerodynamiczny układ był ostatnią opcją do rozważenia wielotrybowego bezzałogowego statku powietrznego wielokrotnego użytku o dużych naddźwiękowych prędkościach lotu.
Koncepcja i ogólny układ
Charakterystycznym wymogiem dla przyśpieszającego samolotu, w porównaniu z jego małogabarytowym prototypem, jest start/lądowanie na samolocie z istniejących lotnisk i konieczność latania z liczbami Macha mniejszymi niż silnik startowy Mach M < 1.8 ... 2 To determinuje rodzaj i skład połączonego zespołu napędowego samolotu - akceleratora, który zawiera silnik strumieniowy i silniki turboodrzutowe z dopalaczem (TRDF).
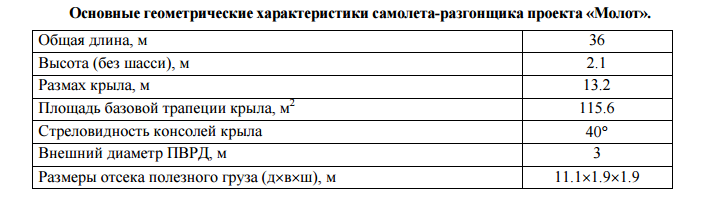
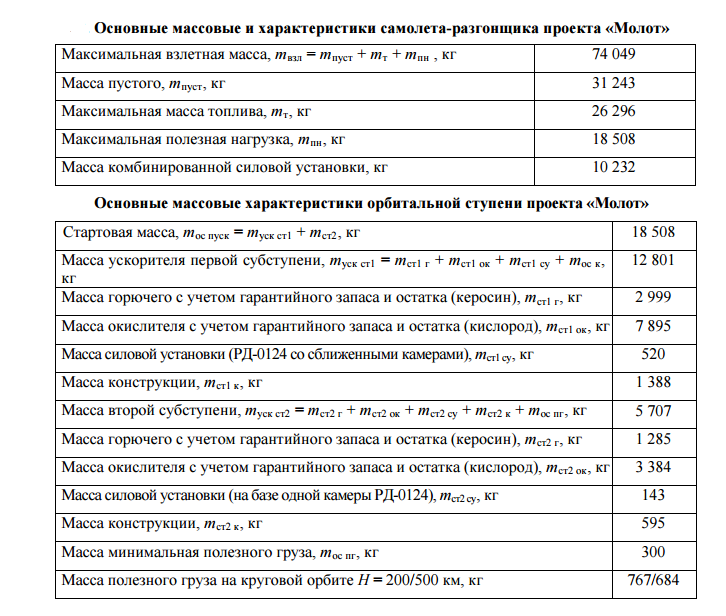
Na tej podstawie utworzono kształt techniczny i ogólny układ samolotu wspomagającego dla lekkiego systemu transportu kosmicznego o ładowności projektowej około 1000 kg na niską orbitę okołoziemską o długości 200 km. Parametry wagowe ciekłego dwustopniowego stopnia orbitalnego opartego na silniku tlenowo-naftowym RD-0124 oszacowano metodą prędkości charakterystycznych ze stratami całkowitymi, na podstawie warunków startu z akceleratora.

W pierwszym etapie montowany jest silnik RD-0124 (ciąg pusty 30 000 kg, impuls jednostkowy 359 s), ale o zmniejszonej średnicy ramy i bliższych komorach lub silnik RD-0124M (od bazowego różni się jedną komorą i nowa dysza o większej średnicy); w drugim etapie silnik z jedną komorą z RD-0124 (przyjęto pusty ciąg 7 kg). Na podstawie otrzymanego zestawienia mas etapu orbitalnego o łącznej masie 500 18 kg opracowano jego konfigurację, a na jej podstawie rozplanowanie naddźwiękowego samolotu wspomagającego o masie startowej 508 74 kg z elektrownią kombinowaną ( PROCESOR).
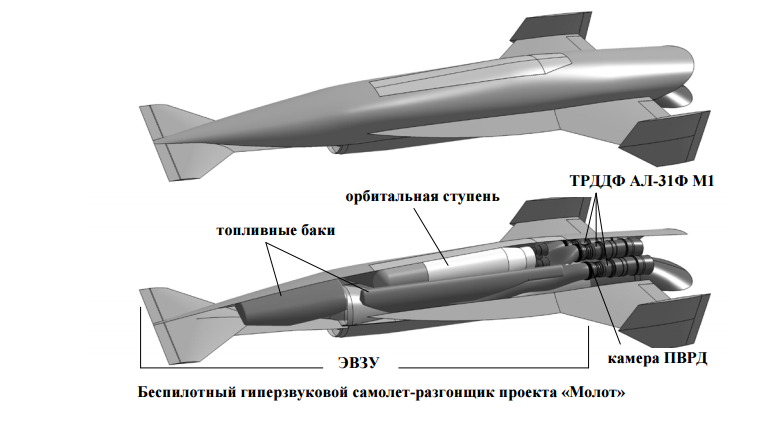
KSU obejmuje:
• Strumień z takim samym typem i układem komory spalania jak prototyp EVZU;
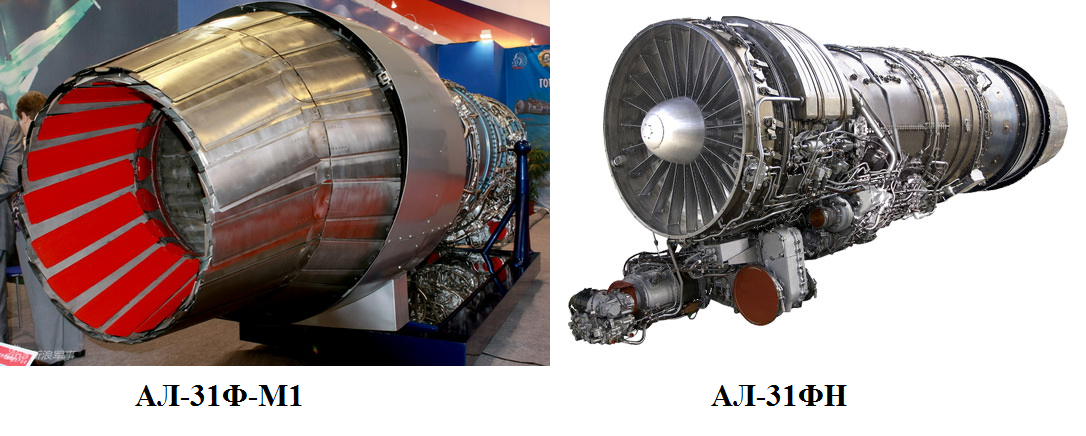
• Trzy silniki turboodrzutowe z dopalaczem AL-31F M1;
Silniki turbowentylatorowe i strumieniowe są rozmieszczone w układzie pionowym, dzięki czemu każdy z nich można montować i serwisować osobno. Aby pomieścić silnik strumieniowy z EVZU o maksymalnych rozmiarach i odpowiednio ciągu, wykorzystano całą długość urządzenia. Maksymalna masa startowa urządzenia to 74 t. Masa własna to 31 ton.
Sekcja przedstawia etap orbitalny - dwustopniowy pojazd nośny na paliwo ciekłe ważący 18,5 tony, który wyrzuca ładunek o masie 1000 kg na niską orbitę okołoziemską o długości 200 km. Widoczne są również 3 silniki turbowentylatorowe AL-31FM1.
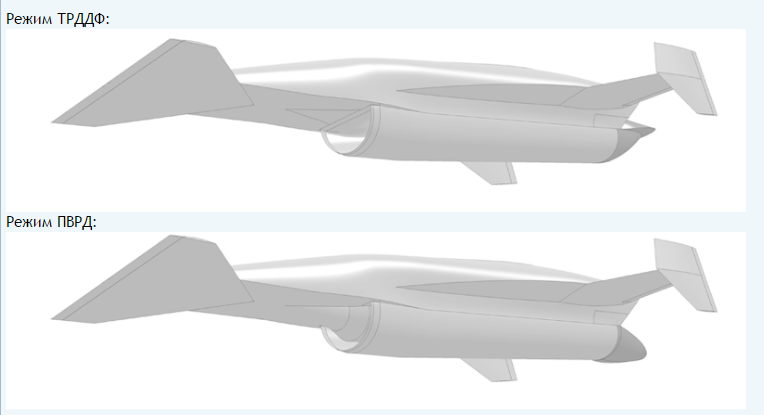
Eksperymentalne opracowanie silnika strumieniowego tej wielkości ma być przeprowadzone bezpośrednio w testach w locie z wykorzystaniem silnika turbowentylatorowego do przyspieszenia. Przy opracowywaniu pojedynczego układu dolotowego powietrza przyjęto następujące podstawowe zasady:
• Minimum ruchomych części z minimalnym obciążeniem mocy;
• Pełne zachowanie geometrii teoretycznej odrzutowca VZU prototypu.
Wdrożony poprzez oddzielenie kanałów powietrznych dla silników turbowentylatorowych i strumieniowych za naddźwiękową częścią wlotu powietrza i opracowanie prostego w obsłudze urządzenia transformatorowego, które przekształca naddźwiękową część EVZU tam i z powrotem w nieuregulowane konfiguracje, jednocześnie przełączając powietrze dostawa między kanałami. EVRU urządzenia na starcie działa na silniku turbowentylatorowym, gdy prędkość jest ustawiona na M = 2,0, przełącza się na silnik strumieniowy.
Za transformatorem EVZU komora ładunkowa i główne zbiorniki paliwa znajdują się w poziomym opakowaniu. Zastosowanie zbiorników wstawianych jest konieczne do termicznego odsprzęgnięcia „gorącej” konstrukcji kadłuba oraz „zimnych” izolowanych termicznie zbiorników z naftą. Za przedziałem ładunkowym znajduje się przedział turbowentylatorowy, który ma kanały przepływowe do chłodzenia dysz silnika, konstrukcję przedziału i górną klapę dyszy strumieniowej podczas pracy turbowentylatora.
Zasada działania transformatora EVZU samolotu przyspieszającego w niewielkim stopniu eliminuje opór siłowy na ruchomą część urządzenia od strony napływającego strumienia. Minimalizuje to względną masę układu wlotu powietrza poprzez zmniejszenie masy samego urządzenia i jego napędu w porównaniu z tradycyjnymi regulowanymi prostokątnymi wlotami powietrza. Strumień ma rozdzielającą dyszę, która po zamknięciu podczas pracy silnika turbowentylatorowego zapewnia nierozdzielny przepływ strumienia wokół kadłuba. Podczas otwierania układacza dysz przy przejściu do trybu pracy strumieniowej górna klapa zamyka dolną część komory turbowentylatorowej. Dysza strumieniowa w otwartej postaci jest naddźwiękowym konfuserem i, przy pewnym niedostatecznym rozprężeniu strumienia strumieniowego, realizowanego przy wysokich liczbach Macha, zapewnia wzrost ciągu z powodu wzdłużnego rzutu sił nacisku na górną klapę.
W porównaniu z prototypem względna powierzchnia paneli skrzydeł została znacznie zwiększona ze względu na konieczność startu/lądowania samolotu. Mechanizacja skrzydła obejmuje tylko elevons. Kile wyposażone są w stery, które mogą służyć jako klocki hamulcowe do lądowania. Aby zapewnić ciągłość przepływu przy prędkościach poddźwiękowych, ekran ma odchylany nosek. Podwozie przyspieszającego samolotu jest czterosłupkowe z umieszczeniem wzdłuż boków, aby zapobiec przedostawaniu się brudu i ciał obcych do wlotu powietrza. Taki schemat został opracowany na produkcie EPOS - analogu systemu orbitalnego samolotu "Spirala", który pozwala, podobnie jak podwozie rowerowe, "przysiadać" podczas startu.
W celu wyznaczenia ciężarów lotu, położenia środka masy oraz własnych momentów bezwładności przyśpieszającego samolotu opracowano w środowisku CAD uproszczony model bryłowy.
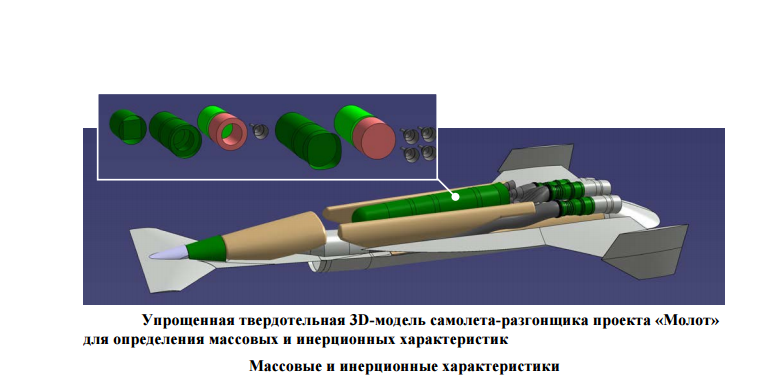
Konstrukcja, elektrownia i wyposażenie samolotu startowego zostały podzielone na 28 elementów, z których każdy został oceniony za pomocą parametru statystycznego (ciężar właściwy zredukowanego poszycia itp.) i zamodelowany jako geometrycznie podobny element bryłowy. Do projektowania kadłuba i powierzchni nośnych wykorzystano statystyki wagowe samolotów typu MiG-25/MiG-31. Masa silnika AL-31F M1 jest brana „w rzeczywistości”. Różne procenty wypełnienia naftą modelowano za pomocą obciętych stałych „odlewów” wewnętrznych wnęk zbiorników paliwa.
Opracowano również uproszczony model półprzewodnikowy etapu orbitalnego, a masy elementów konstrukcyjnych pobrano na podstawie danych z bloku „I” (trzeci etap rakiety Sojuz-2 i obiecującej rakiety Angara ) z przydziałem składników stałych i zmiennych w zależności od masy paliwa.
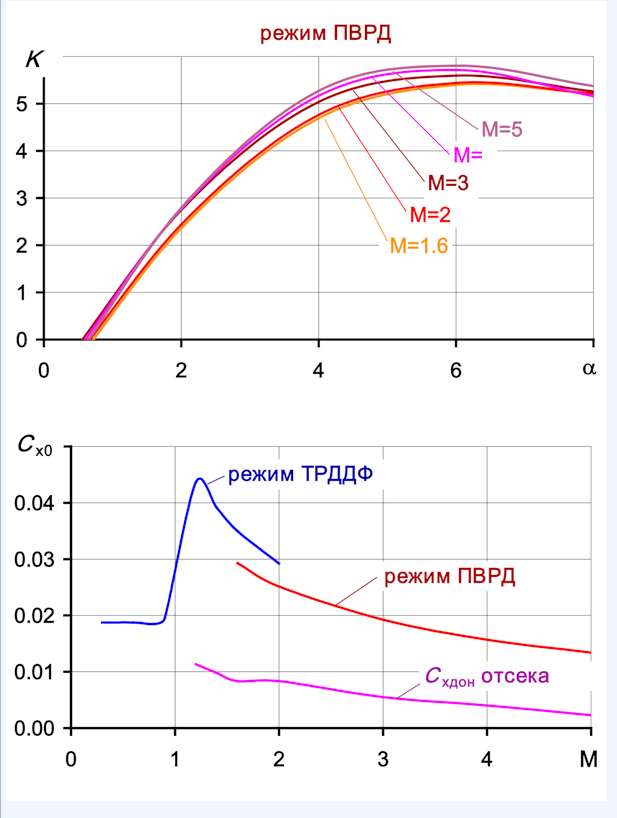
Niektóre cechy uzyskanych wyników aerodynamiki opracowanego samolotu:
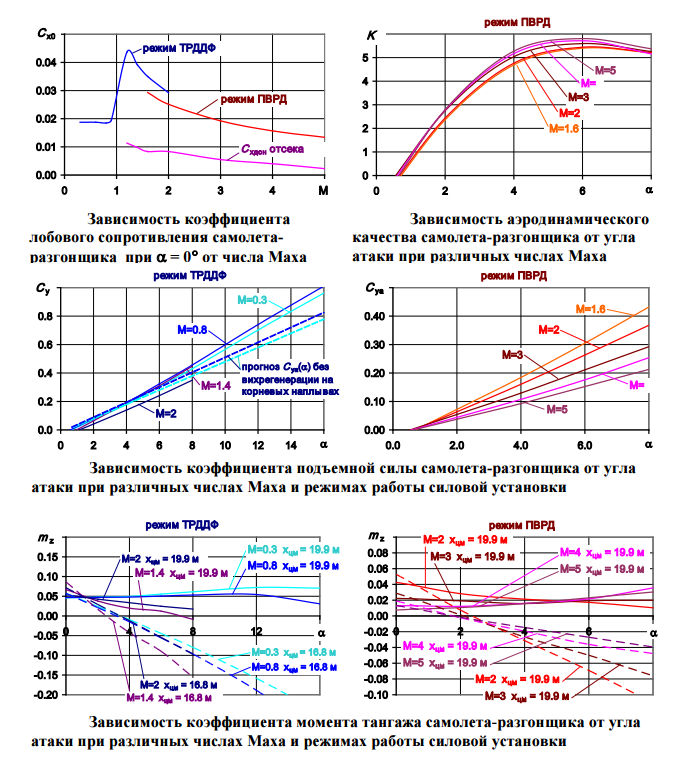
W przyspieszającym samolocie, aby zwiększyć zasięg lotu, tryb szybowania jest używany, gdy jest skonfigurowany do silnika strumieniowego, ale bez zasilania go paliwem. W tym trybie stosuje się dyszę spustową, która zmniejsza jego rozwiązanie, gdy strumień jest wyłączony do obszaru przepływu zapewniającego przepływ w kanale EVZU, tak że nacisk dyfuzora poddźwiękowego kanału staje się równy rezystancja dyszy:
Pdiff EVZU = silnik strumieniowy XS. Mówiąc najprościej, zasada działania urządzenia dławiącego jest stosowana w obiektach testowych TsAGI SVS-2. Zmontowana dysza układająca otwiera dolną część komory silnika turbowentylatorowego, która zaczyna tworzyć własny opór dolny, ale mniejszy niż opór wyłączonego strumienia z przepływem naddźwiękowym w kanale VDU. W testach EVZU na obiekcie TsAGI SVS-2 wykazano stabilną pracę wlotu powietrza od liczby Macha M = 1.3, można więc argumentować, że tryb szybowania z wykorzystaniem dyszy sztaplującej jako przepustnicy EVZU w można zapewnić zakres 1.3 ≤ M ≤ Mmax.
Osiągi lotu i typowy tor lotu
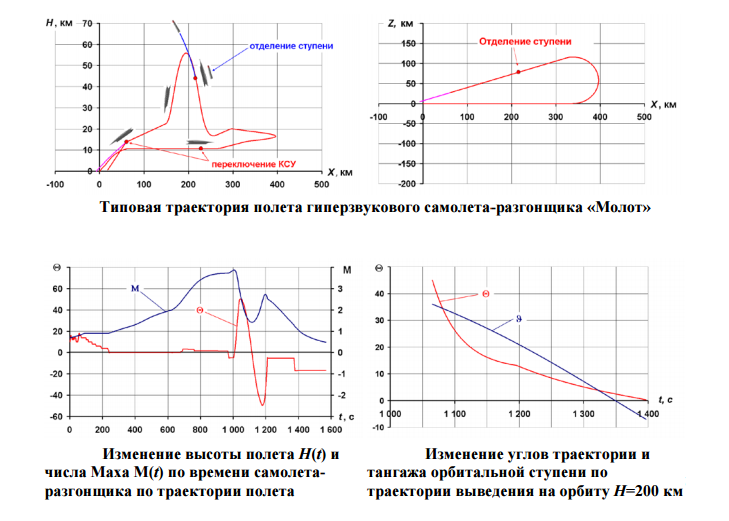
Zadaniem samolotu startowego jest wystrzelenie z pokładu stopnia orbitalnego w locie, na wysokości, prędkości lotu i kącie trajektorii spełniających warunek maksymalnej masy ładunku na orbicie referencyjnej. Na wstępnym etapie badań nad projektem Molot zadaniem jest osiągnięcie maksymalnej wysokości i prędkości lotu tego samolotu przy wykorzystaniu manewru „wzgórza” do wytworzenia dużych dodatnich wartości kąta trajektorii na jego wznoszącej gałęzi. W tym przypadku warunek minimalizacji głowicy prędkości podczas separacji stopni jest ustawiony na odpowiednie zmniejszenie masy owiewki i zmniejszenie obciążenia przedziału ładunkowego w pozycji otwartej.
Wyjściowymi danymi dotyczącymi pracy silników były właściwości trakcyjne i ekonomiczne AL-31F, skorygowane na podstawie danych stanowiskowych silnika AL-31F M1, a także przeliczona proporcjonalnie do komory spalania charakterystyka prototypowego strumienia strumieniowego i kąt montażu ekranu.
Na ryc. pokazuje obszary poziomego, ustalonego lotu naddźwiękowego dopalacza w różnych trybach pracy zespolonej elektrowni.
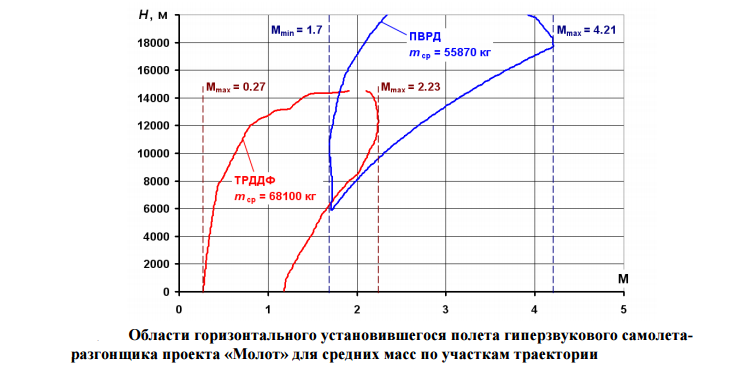
Każda strefa jest obliczana na podstawie średniej na odpowiednim odcinku akceleratora projektu Molot dla średnich mas na odcinkach trajektorii masy lotu pojazdu. Widać, że przyśpieszający samolot osiąga maksymalną liczbę Macha w locie M = 4.21, podczas lotu na silnikach turboodrzutowych liczba Macha jest ograniczona do M = 2.23. Należy zauważyć, że wykres ilustruje potrzebę zapewnienia wymaganego ciągu strumieniowego dla przyśpieszającego samolotu w szerokim zakresie liczb Macha, co zostało osiągnięte i określone doświadczalnie w trakcie prac nad wlotem powietrza ekranu prototypu. Start odbywa się z prędkością startową V = 360 m/s - właściwości nośne skrzydła i ekranu są wystarczające bez użycia mechanizacji startu i lądowania oraz zawisu w elevonie. Po optymalnym wzniesieniu na poziomym odcinku H = 10 m rozpędzony samolot osiąga prędkość ponaddźwiękową od poddźwiękowej liczby Macha M = 700, zespół napędowy przełącza się na M = 0.9, a wstępne rozpędzanie do Vopt na M = 2. Przyspieszający samolot podczas wznoszenia się na silniku strumieniowym wykonuje zwrot na lotnisko macierzyste i osiąga wysokość H2.46peak = 0 20 m przy liczbie Macha M = 000.
Na tej wysokości manewr dynamiczny zaczyna osiągać maksymalną wysokość lotu i kąt trajektorii dla wystrzelenia na orbitę. Wykonuje się łagodne nurkowanie z przyspieszeniem do M = 3.9 i następującym po nim manewrem „wzgórza”. Siłownik kończy swoją pracę na wysokości H ≈ 25000 44 m, a kolejne wznoszenie następuje dzięki energii kinetycznej wzmacniacza. Start etapu orbitalnego odbywa się na wznoszącej gałęzi trajektorii na wysokości Hlaunch = 049 m przy liczbie Macha M = 2.05 i kącie trajektorii θ = 45°. Przyspieszający samolot osiąga na „wzgórzu” wysokość Hmax = 55 871 m. Na opadającym odgałęzieniu trajektorii, po osiągnięciu liczby Macha M = 1.3, następuje przełączenie silnika strumieniowego → turboodrzutowego, aby wyeliminować skok dolotu strumieniowego .
W konfiguracji turbowentylatorowej przyspieszający samolot szybuje aż do osiągnięcia ścieżki schodzenia, mając na pokładzie zapas paliwa Ggf = 1000 kg.
W trybie normalnym cały lot od momentu wyłączenia silnika do lądowania odbywa się bez użycia silników z marginesem w zakresie schodzenia.
Na tym rysunku pokazano zmianę parametrów kątowych ruchu krokowego.
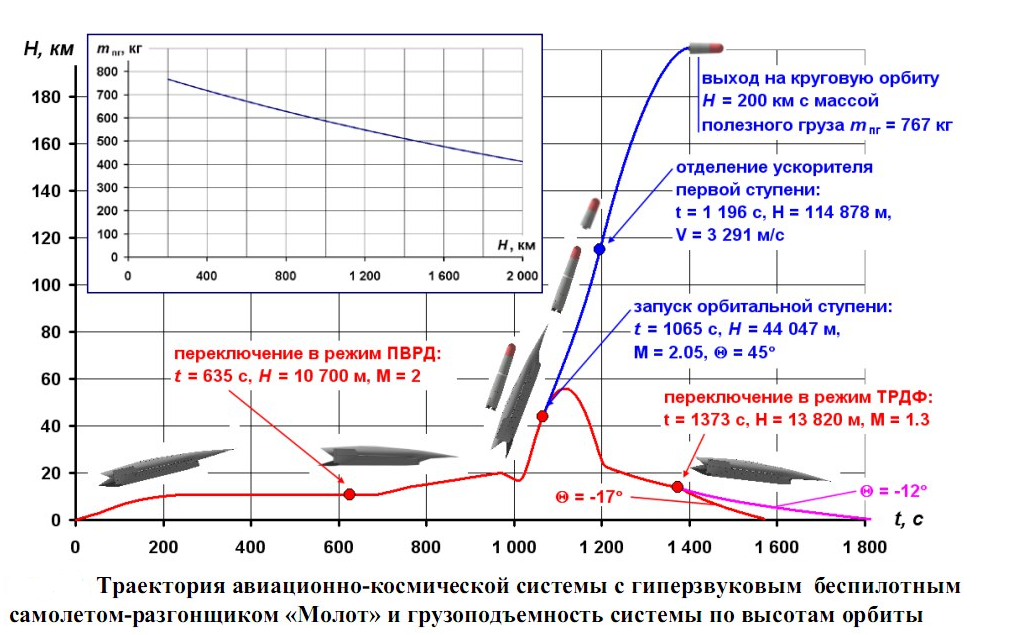
Przy wystrzeleniu na orbitę kołową H = 200 km na wysokości H = 114 878 m przy prędkości V = 3 291 m/s akcelerator pierwszego podstopnia rozdziela się. Masa drugiego podetapu z ładunkiem na orbicie H = 200 km wynosi 1504 kg, z czego ładunek mpg = 767 kg.
Schemat zastosowania i tor lotu naddźwiękowego dopalacza projektu Molot jest analogiczny do amerykańskiego „uniwersyteckiego” projektu RASCAL, który powstaje przy wsparciu departamentu rządowego DARPA.
Cechą projektów Molot i RASCAL jest zastosowanie manewru dynamicznego typu garb z pasywnym dostępem do dużych wysokości startu etapu orbitalnego Hlaunch ≈ 50 000 m przy niskich ciśnieniach prędkości, dla wyrzutu Molota = 24 kg/m2. Wysokość startu umożliwia zmniejszenie strat grawitacyjnych i czasu lotu drogiego jednorazowego stopnia orbitalnego, czyli jego całkowitej masy. Niskie ciśnienie startu pozwala zminimalizować masę owiewki ładunku lub w niektórych przypadkach całkowicie z niej zrezygnować, co jest niezbędne w przypadku systemów klasy ultralekkiej (mpgN200<1000 kg).
Podstawowym atutem samolotu startowego projektu Molot w porównaniu z RASCALem jest brak pokładowych dostaw ciekłego tlenu, co upraszcza i obniża koszty jego eksploatacji oraz wyklucza nierozwiniętą technologię. lotnictwo zbiorniki kriogeniczne wielokrotnego użytku. Stosunek ciągu do masy w trybie pracy strumieniem strumieniowym pozwala akceleratorowi Molota na osiągnięcie na wznoszącej gałęzi „wzgórza” „roboczych” kątów trajektorii dla stopnia orbitalnego θstart ≈ 45°, podczas gdy akcelerator RASCAL zapewnia jego etap orbitalny o początkowym kącie trajektorii wynoszącym tylko θstart ≈ 20° z późniejszymi stratami spowodowanymi manewrem obracania sceny.
Pod względem nośności właściwej system lotniczy z hipersonicznym bezzałogowym akceleratorem Molot przewyższa system RASCAL: (mpgN500/mvzl)hammer = 0.93%, (mpnN486/mvzl)rascal = 0.25%.
Tak więc technologia silnika strumieniowego z poddźwiękową komorą spalania („klucz” projektu Molot) opracowana i opanowana przez krajowy przemysł lotniczy przewyższa obiecującą amerykańską technologię wtrysku tlenu do turbowentylatorowego przewodu wlotowego powietrza turbowentylatorowego w naddźwiękowych samolotach przyspieszających. .
Bezzałogowy statek powietrzny hipersoniczny o masie 74 000 kg startuje z lotniska, przyspiesza, wznosi się po zoptymalizowanej trajektorii z pośrednim zakrętem do punktu startu do wysokości H=20 000 m i M=3.73, dynamiczny” manewr hill” z pośrednim przyspieszeniem w czaszy nurkującej do М = 3.9. Na wznoszącym się odgałęzieniu trajektorii przy H=44 047 m, M=2 wydzielony jest dwustopniowy stopień orbitalny o masie 18 508 kg, zaprojektowany na bazie silnika RD-0124.
Po pokonaniu „górki” Нmax = 55 871 m w trybie szybowcowym akcelerator wykonuje lot na lotnisko z gwarantowanym zapasem paliwa 1000 kg i masą do lądowania 36 579 kg. Etap orbitalny wprowadza na orbitę kołową H = 200 km ładunek o masie mpg = 767 kg, przy H = 500 km mpg = 686 kg.
Pomoc.
1. Baza laboratoryjna i badawcza NPO Molniya obejmuje następujące kompleksy laboratoryjne:
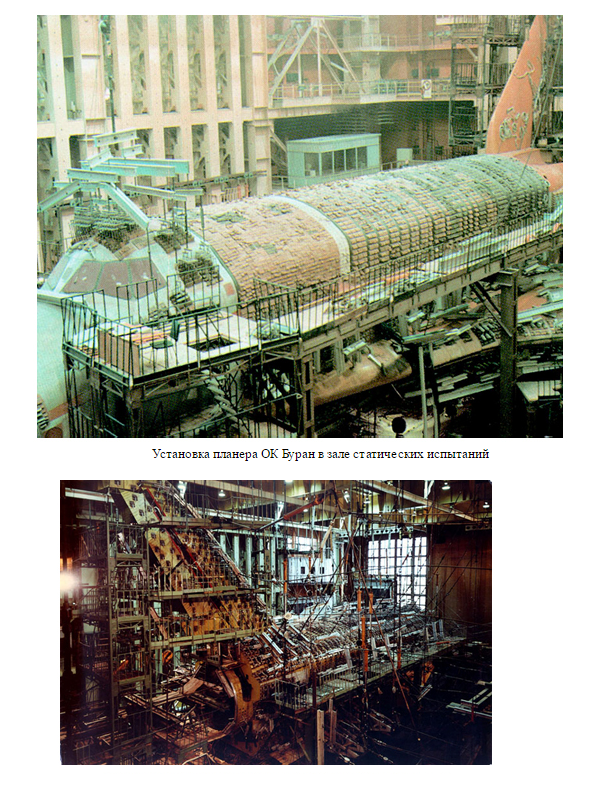
Laboratorium badań wytrzymałości statycznej
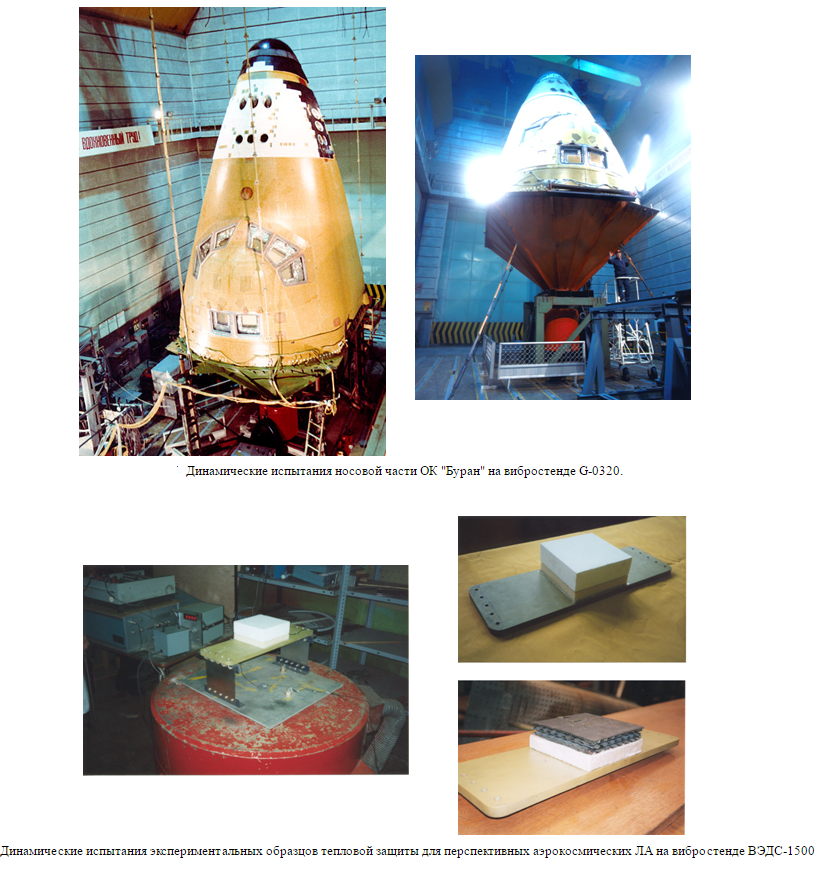
Laboratorium Badań Dynamicznych
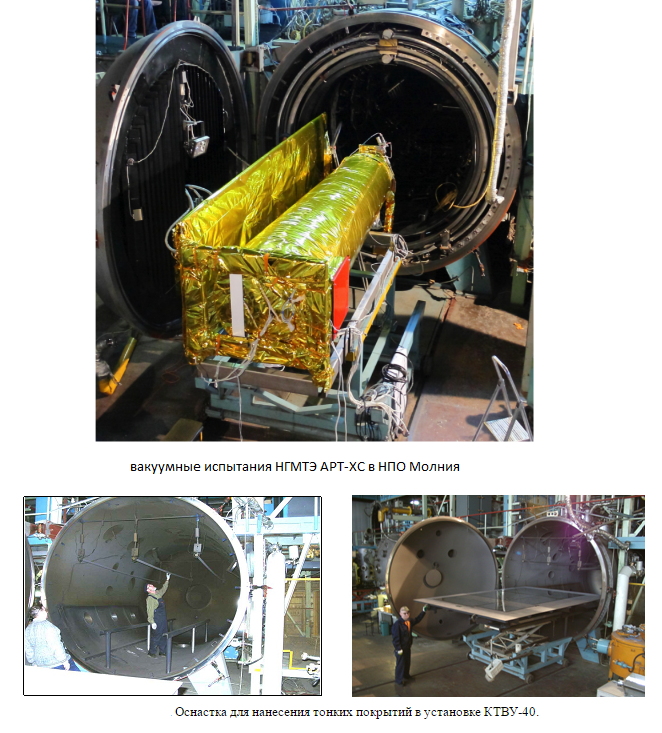
Laboratorium kriotermicznych testów próżniowych
Laboratorium Badań Środowiskowych
Laboratorium badań tribologicznych
2. A to jest projekt szybkiego cywilnego samolotu HEXAFLY-INT

Który jest jednym z największych projektów współpracy międzynarodowej. Zaangażowane są w nią wiodące organizacje europejskie (ESA, ONERA, DLR, CIRA itp.), rosyjskie (TsAGI, CIAM, LII, MIPT) i australijskie (The University of Sydney itp.).

3. Rostec nie dopuścił do bankructwa przedsiębiorstwa, które opracowało prom kosmiczny „Buran”
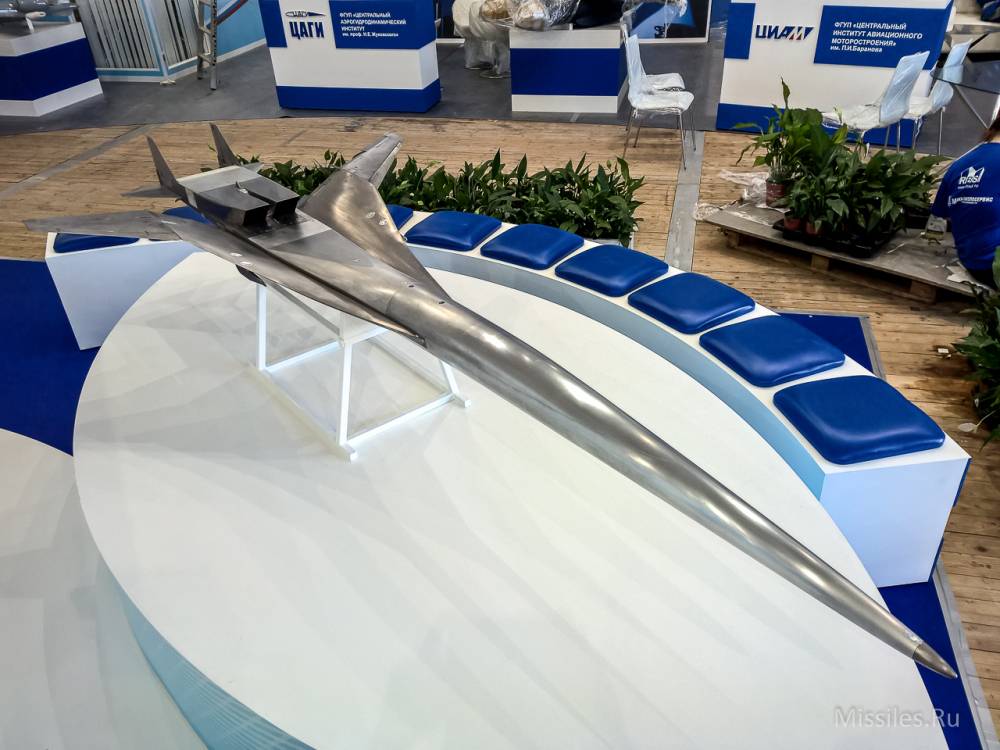
Uwaga: Model 3D na początku artykułu nie ma nic wspólnego z projektem badawczym „Młot”.
Artykuł na podstawie pracy:
Projekt Molota naddźwiękowego bezzałogowego samolotu przyspieszającego z połączonym ekranem turboodrzutowym układem napędowym
/Makeich G. S., Tyukaev M. Yu (Moskiewski Instytut Lotniczy (Narodowy Uniwersytet Badawczy), Autostrada Wołokołamska, 4, Moskwa, A-80, GSP-3, 125993, Rosja), Chibisov Ya. N. (OAO Nauchno - stowarzyszenie produkcyjne "Mołnia") /
Wykorzystane materiały, zdjęcia i filmy
http://www.mai.ru/
http://www.ciam.ru/
http://www.npomolniya.ru/
http://en.avia.pro/
http://www.darpa.mil/
www.youtube.com
http://otvaga2004.ru/
http://www.3dmir.ru/forum/read/5075.html
http://www.globalsecurity.org/
http://36on.ru/news/economics/64320-v-sovete-federatsii-proshli-dni-voronezhskoy-oblast
informacja