Doświadczony pojazd terenowy-transporter ZIL-135Sh
Przez wiele lat Biuro Projektów Specjalnych Zakładu. IA Lichaczow opracował projekty dotyczące ultra-wysokiej technologii biegowej. Głównym klientem takich maszyn było Ministerstwo Obrony, ale od pewnego czasu rolę tę zaczęły pełnić inne resorty. Tak więc na początku lat sześćdziesiątych rozpoczęła się współpraca SKB ZIL z przedsiębiorstwami przemysłu kosmicznego. Jednym z najciekawszych wyników był doświadczony pojazd terenowy ZIL-135Sz.
W połowie lat sześćdziesiątych radziecki program kosmiczny napotkał pewne trudności logistyczne. Rakiety kosmiczne zbudowano w zakładach Progress w Kujbyszewie (obecnie Samara), po czym zmontowano je koleją do kosmodromu Bajkonur, gdzie ostatecznie zostały zmontowane i przygotowane do startu. W przypadku rakiet nośnych opartych na platformie R-7 takie metody wyglądały na akceptowalne. Jednak już trwał rozwój „księżycowej” rakiety N-1, która wyróżniała się zwiększonymi wymiarami. Dostawa jego jednostek do kosmodromu wiązała się z poważnymi problemami.

Model ZIL-135Sh na poligonie. Zdjęcia Russkaya-sila.rf
Biorąc pod uwagę alternatywy dla transportu kolejowego, specjaliści OKB-1, na czele z S.P. Korolowom zaoferowano oryginalną wersję dostawy zestawów rakietowych na Bajkonur. Proponowano budowę schodów w Kujbyszewie, po czym miały być one przetransportowane specjalną barką wzdłuż Wołgi i Morza Kaspijskiego do miasta Guryev (obecnie Atyrau w Kazachstanie). Tam planowano przeładować technologię rakietową na specjalne pojazdy i dostarczyć ją drogą lądową do kosmodromu. Do realizacji takiej propozycji konieczne było stworzenie barki rzecznej i pojazdu lądowego o dopuszczalnych parametrach. W przypadku transportu lądowego zadanie konstruktorów komplikował fakt, że poszczególne jednostki przyszłego N-1 mogły ważyć co najmniej 20-25 ton.
Grupa inżynierów OKB-1 kierowana przez V.P. Pietrow stworzył przybliżony obraz przyszłego przenośnika i przedstawił kilka ważnych propozycji. Tak więc, aby zapewnić akceptowalną mobilność i zwrotność, maszyna potrzebowała orientowanych kół typu stosowanego na przednim podwoziu samolotu. Jednocześnie pożądane cechy zdolności przełajowych i mobilności na stepach kazachskiej SRR można było uzyskać tylko za pomocą kół o średnicy co najmniej 1,5 m. Mając takie podwozie, przyszły przenośnik mógłby uzyskać akceptowalne wymiary i pokaż żądaną ładowność.
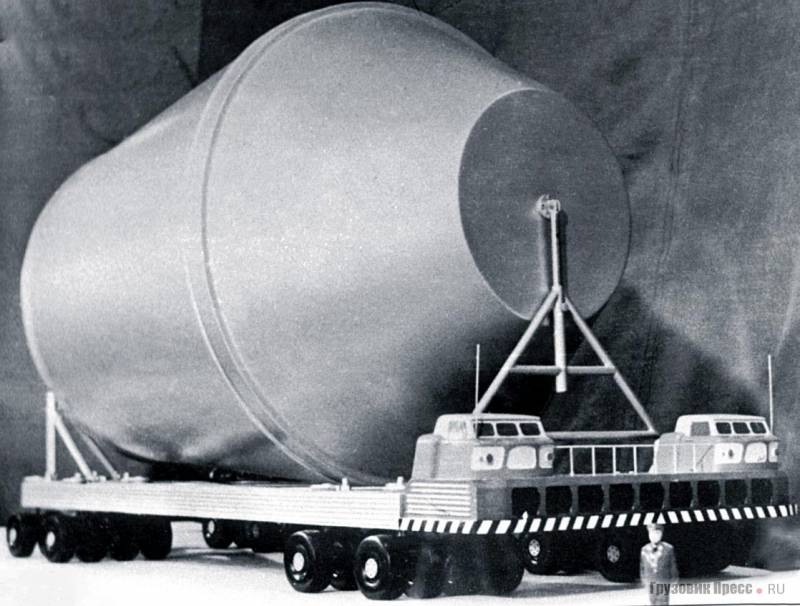
Model przyszłego transportera pełnowymiarowego z ładownością. Zdjęcia gruzovikpress.ru
Po utworzeniu przybliżonego obrazu przyszłego transportera rakietowego OKB-1 rozpoczęło poszukiwania dewelopera pełnoprawnego projektu. Kilka krajowych fabryk samochodów na raz miało niezbędne doświadczenie, ale nie wszystkie z nich były entuzjastycznie nastawione do propozycji projektantów „kosmicznych”. Tak więc Instytut NAMI i Mińska Fabryka Samochodów nie odważyli się uczestniczyć w tak złożonym projekcie, na którego rozwój zresztą nie przeznaczono zbyt wiele czasu.
Sytuację uratował SKB ZIL, na czele z V.A. Grachev. Na spotkaniu poświęconym rozwojowi nowego pojazdu wyraził gotowość stworzenia specjalnego pojazdu zdolnego przewieźć w trudnym terenie ładunek do 100 ton - czterokrotność wymaganego ładunku. Proste obliczenia wykazały, że obiecujący pojazd terenowy byłby w stanie unieść cały drugi lub trzeci stopień rakiety N-1. Większy i cięższy pierwszy stopień można było rozłożyć na zaledwie trzy sekcje.
Tak więc, aby przetransportować wszystkie elementy rakiety na Bajkonur, potrzeba było tylko pięciu lub sześciu lotów przenośnika, po czym można było rozpocząć montaż rakiety. W przypadku transportu kolejowego wymagany był cały rzut, a montaż zająłby znacznie więcej czasu.
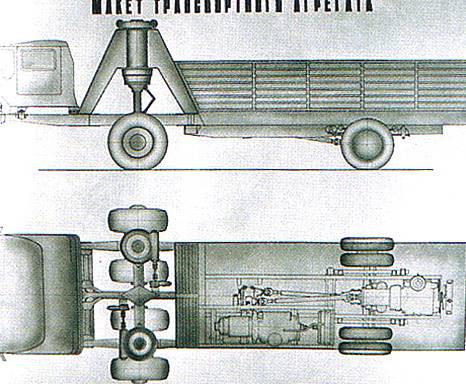
Schemat eksperymentalnego ZIL-135Sh. Rysunek Russian-power.rf
Wkrótce pojawiło się wiele dokumentów, które oficjalnie rozpoczęły nowy projekt. SKB ZIL został wyznaczony na głównego dewelopera transportera dla przemysłu kosmicznego. Projektowanie specjalnych systemów elektrycznych powierzono Biuru Projektów Specjalnych Moskiewskiego Zakładu nr 467 im. F.E. Dzierżyński. OKB-1 podjęło się przygotowania SIWZ, koordynacji prac i pomocy administracyjnej.
Na początku 1967 roku kilka przedsiębiorstw wspólnie ukształtowało wizerunek przyszłego przewoźnika. Zaproponowano zbudowanie samochodu z platformą ładunkową o wymiarach 10,8x21,1 m. Podwozie miało mieć konstrukcję ośmioosiową z układem kół 32x32. Zaproponowano montaż kół parami na obrotowych stojakach. W każdym rogu kadłuba umieszczono cztery takie stojaki. Dzięki takiej konstrukcji podwozia możliwe było zapewnienie najwyższej zwrotności. Masa brutto osiągnęłaby 80-100 ton przy ładowności około obiecanych 100 ton.
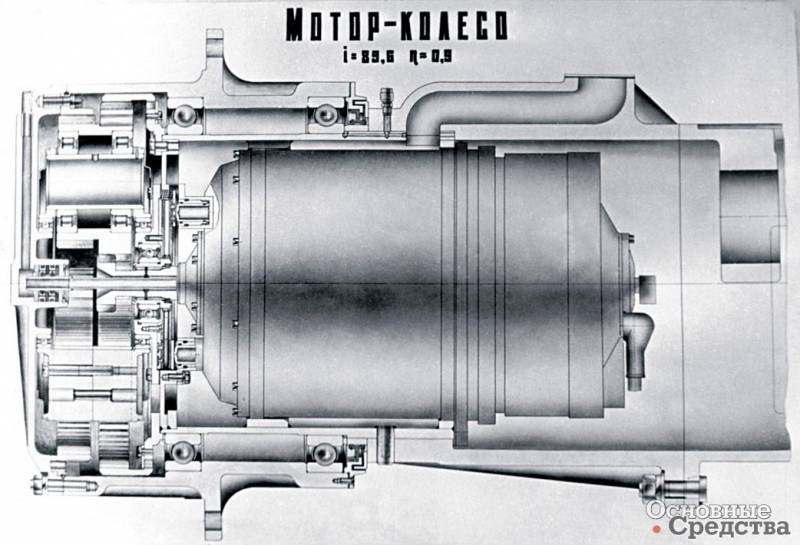
Schemat koła motorowego z silnikiem DT-15M. Rysunek Os1.ru
Oczywistym jest, że budowa doświadczonego przenośnika w pełnej konfiguracji nie miała jeszcze sensu. Przed opracowaniem pełnoprawnego projektu zaproponowano stworzenie, zbudowanie i przetestowanie prototypu w uproszczonej konfiguracji. Z punktu widzenia podwozia ta maszyna miała być jedną ósmą pełnowymiarowego przenośnika. Przy pomocy zredukowanego zestawu sprzętu można było przetestować główne pomysły i rozwiązania, a także wyciągnąć pewne wnioski i dokonać zmian w istniejącym projekcie.
Zaproponowano stworzenie próbki makiety z gotowych komponentów i zespołów. Głównym źródłem komponentów miały być pojazdy terenowe z rodziny ZIL-135. Na przykład przekładnia elektryczna została oparta na jednostkach pojazdu terenowego ZIL-135E. W związku z tym pojazd eksperymentalny oznaczono jako ZIL-135Sh („Podwozie”). Znaleziono również oznaczenie ZIL-135MSh. Należy zauważyć, że część jednostek została zapożyczona z samolotu Ił-18, ale fakt ten nie znalazł odzwierciedlenia w nazwie projektu.
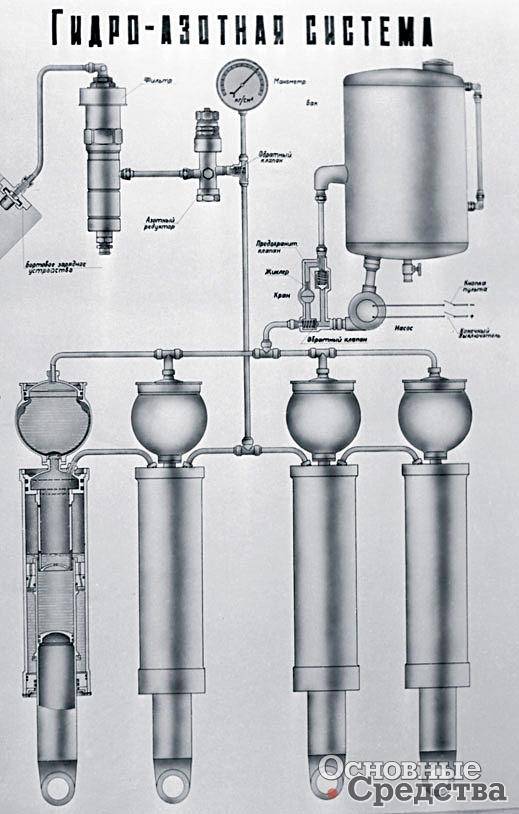
Schemat układu hydropneumatycznego maszyny. Rysunek Os1.ru
W projekcie ZIL-135Sz zaproponowano budowę samobieżnego laboratorium o nietypowej konstrukcji, która ma najpoważniejsze różnice w stosunku do innych ultrawysokich pojazdów terenowych. Cechy szczególne były obecne zarówno w składzie zespołu napędowego lub skrzyni biegów, jak i konstrukcji podwozia. W szczególności ten ostatni miał łączyć tradycyjne jednostki i elementy przyszłego przenośnika „kosmicznego”.
Podstawą maszyny doświadczalnej była rama o złożonym kształcie. Jego przednią i tylną część wykonano na planie prostokąta. Pomiędzy nimi, tuż za kabiną, znajdowały się podłużne dźwigary o profilu w kształcie litery L. Przeznaczone były do montażu specjalnych elementów podwozia. Do zamontowania kabiny proponowano wykorzystać przedni zwis ramy, aw jej tylnej części umieszczono jednocześnie elementy dwóch elektrowni. Umieszczono tam również ciało do przewozu różnych towarów lub mienia.
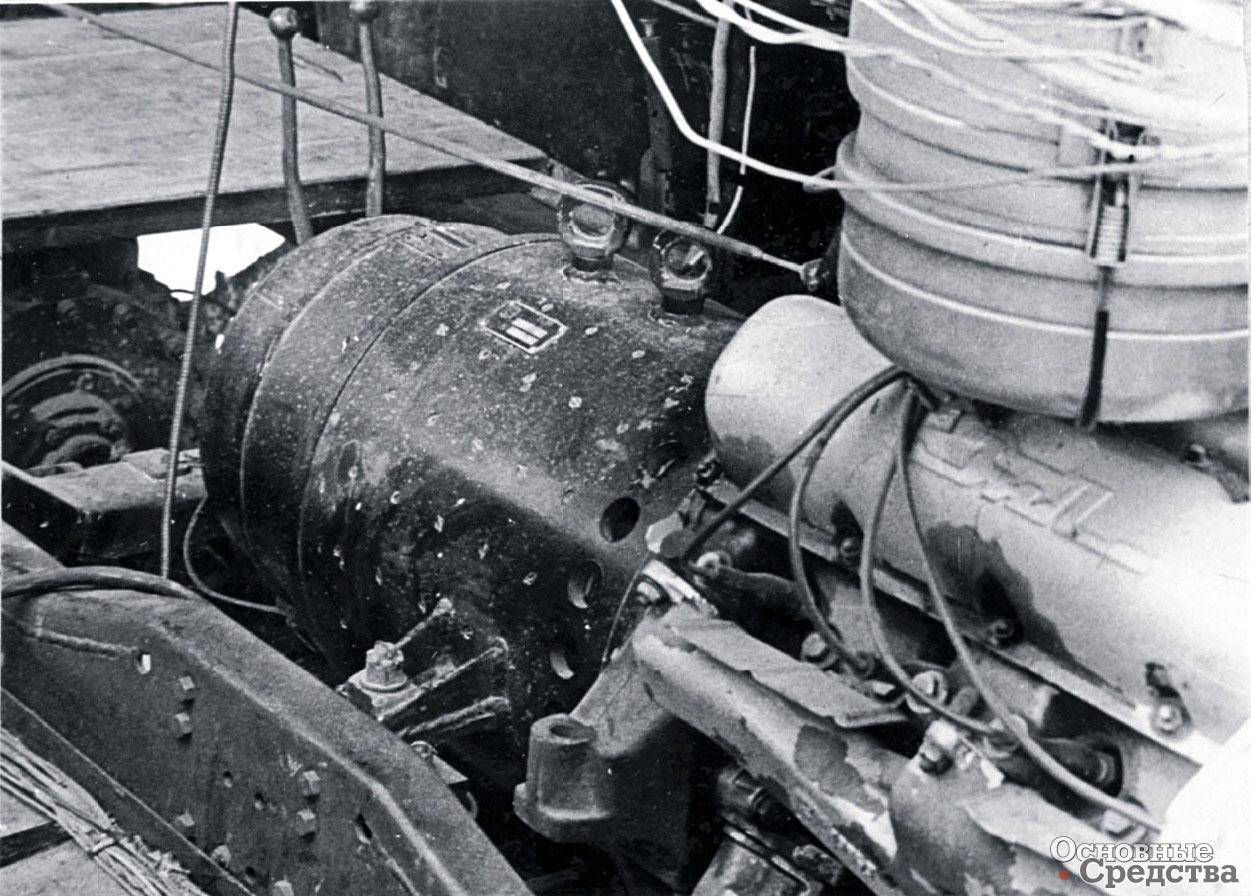
Elektrownia ZIL-135Sh składała się z dwóch silników ZIL-375Ya o mocy 375 KM każdy. Pierwszy silnik znajdował się na tylnym zespole ramy, przed nim. Z tyłu platformy, bezpośrednio nad osią koła, umieszczono drugi silnik. Przedni silnik połączono z prądnicą GET-120 o mocy 120 kW, która stanowiła podstawę przekładni elektrycznej. Drugi silnik został wyposażony w przekładnię hydromechaniczną połączoną z tylną osią napędową. Zgodnie z planem projektantów głównym silnikiem był przedni, będący częścią jednostki benzynowo-elektrycznej. Drugi silnik miał być używany w niektórych sytuacjach, aby zwiększyć ogólną moc maszyny.
Prawy wspornik koła. Zdjęcie Os1.ru
Na dźwigarach ramy w kształcie litery L zawieszono sprzęt, który był głównym elementem całego eksperymentalnego projektu. Na specjalnych wspornikach pionowych umieszczono dwa stojaki, zbudowane na bazie jednostek samolotu Ił-18. Była pionowa kolumna, która służyła jako hydropneumatyczny amortyzator zawieszenia o skoku 450 mm. Na dźwigarach zamontowano napędy elektryczne, za pomocą których zębatka mogła obracać się wokół osi pionowej, zapewniając manewrowanie. Na dole stojaków znajdowała się para moto-kół.
Zakład nr 476 opracował autorski system synchronicznego serwo do sterowania ruchami regałów. System sterowania umożliwił obrót zębatki pod kątem do 90 ° w prawo i w lewo w dwóch trybach, zgodnie z prawem trapezu lub równoległoboku kierownicy. Przewidziano również możliwość kołowania w obrębie sektora o szerokości 20°. Tryb działania sterów został wybrany przez kierowcę. Przekształcenie kierownicy w polecenia dla napędów zostało zrealizowane przez specjalne urządzenie analogowe, które odbierało dane z szeregu czujników i wysyłało sygnały do siłowników. Takie algorytmy zostały zaimplementowane po raz pierwszy w praktyce krajowej.
Para moto-kół została zamontowana na wspólnym wsporniku w dolnej części zębatki. W piaście każdego z nich znajdował się silnik elektryczny DT-15M DC o mocy 15 kW, połączony z jednostopniową przekładnią planetarną. Koła zostały wyposażone w opony o wymiarach 1200x500x580 mm z rozwiniętym bieżnikiem. Wszystkie cztery koła przednich rozpórek miały scentralizowany system regulacji docisku. Ciśnienie w oponach zmieniało się w granicach 1-3 kg/cmXNUMX.

System kontroli obrotu stojaka. Zdjęcie Os1.ru
Dwa dwukołowe zębatki obrotowe zostały uzupełnione o tylną oś, niezbędną do podparcia ramy we właściwej pozycji. Most z podwójnymi kołami zawieszono na podłużnych sprężynach. Za pomocą przekładni hydromechanicznej moc „tylnego” silnika została przekazana na koła tylnej osi.
Ze względu na specjalną konstrukcję podwozia, układ kół prototypu ZIL-135Sh można określić jako 6x6/4 lub 4x4+2x2. Wszystkie sześć kół samochodu jeździło, ale napęd dwóch tylnych kół można było wyłączyć. Z 6 kół 4 stały się sterowalne i obracały się wraz ze swoimi zębatkami.
W przypadku niektórych testów prototyp ził-135sz był wyposażony w podnośniki hydrauliczne. Kilka takich urządzeń zostało zainstalowanych po bokach przedniej części ramy, bezpośrednio za kabiną. Za pomocą podnośników można było wywiesić przód samochodu, zmieniając obciążenie kół regałów obrotowych.
Punkt mocy. W centrum znajduje się generator GET-120, po prawej silnik ZIL-375 połączony z tylną osią. Zdjęcie Os1.ru
Przedni zwis ramy służył jako podstawa kabiny zapożyczonej z ZIL-135K. Była to jednostka z włókna szklanego z czterema miejscami siedzącymi i widokiem dookoła za pomocą przeszklenia o dużej powierzchni. W związku z zastosowaniem dwóch autonomicznych elektrowni z różnymi opcjami transmisji, kabina otrzymała specjalny zestaw sterowań. Dodatkowa osłona ze sterowaniem systemami elektrycznymi, która była dużych rozmiarów, musiała zostać zamontowana przed prawym miejscem pracy kabiny. Takie podwójne stanowisko kontrolne, które jest bardzo złożone, zapewniało pełną kontrolę nad wszystkimi systemami.
Nad komorą silnika utworzoną przez tylną część ramy zainstalowano szerokie nadwozie boczne. Drewniana przestrzeń ładunkowa o bokach średniej wysokości otrzymała łuki do montażu markizy. Kolejny łuk znajdował się za kabiną i umożliwiał przykrycie dźwigarów rozpórkami skrętnymi z plandeką. Po bokach korpusu znajdowały się drzwi ze stopniami do lądowania. Według doniesień, podczas testów nadwozie służyło do transportu balastu i różnych części materiałowych niezbędnych do testowania sprzętu.
Prototyp ził-135sz miał długość mniejszą niż 9,5 m. Szerokość osiągnęła 3,66 m, wysokość 3,1 m. Masa własna wynosiła 12,9 t. przednia oś utworzona przez parę dwukołowych zębatek. Rozstaw osi prototypu wynosi 12 m. Rozstaw przedniej „osi” wzdłuż środków zębatek wynosił 4,46 m, wzdłuż środków zewnętrznych kół - około półtora raza więcej. Rozstaw osi tylnej - 2 m.

Panel sterowania urządzeniami elektrycznymi. Zdjęcia gruzovikpress.ru
Eksperymentalna maszyna nowego typu, będąca demonstratorem głównej technologii przyszłego „kosmicznego” przenośnika, została zbudowana na początku lata 1967 z maksymalnym wykorzystaniem gotowych komponentów. Pod koniec czerwca samochód został dostarczony na poligon 21. Instytutu Badawczego MON w mieście Bronnitsy. Przez kilka kolejnych miesięcy prototypowy model pracował na poligonie i pokazywał swoje możliwości w warunkach zbliżonych do stepów kazachskiej SRR. Osiągnięto dobre wyniki, a wszystkie nowe jednostki maszyny działały dobrze.
Poruszając się wzdłuż autostrady, ZIL-135Sh przyspieszył do 60 km / h. Średnia prędkość na dobrej drodze była o połowę niższa. Na polnej drodze i łące można było osiągnąć prędkość do 20 km/h, na orce – do 10 km/h. Podczas testów samochód przejechał około 1000 km na różnych nawierzchniach i glebach. Na wszystkich nawierzchniach, także tych o niskiej nośności, pojazd terenowy był pewny siebie. Stwierdzono, że taki przenośnik byłby w stanie normalnie pełnić swoje funkcje w zamierzonych obszarach działania.
Jednym z celów testu było przetestowanie oryginalnego zautomatyzowanego systemu sterowania kołami słupka A. Przy całej swojej złożoności i oczekiwanych zagrożeniach taki sprzęt poradził sobie z powierzonymi mu zadaniami. Automatyka poprawnie opracowywała polecenia z kierownicy i zapewniała wymagane manewrowanie w każdych warunkach. Przy skręcaniu kół kierowanych o 90° udało się uzyskać minimalny promień skrętu (wzdłuż koła zewnętrznego) na poziomie 5,1 m. Auto faktycznie skręcało wokół tylnej osi.

ZIL-135Sh demonstruje zdolność obracania kół o 90 °. Zdjęcia Denisovets.ru
Testy prototypu ZIL-135Sh zakończyły się sukcesem. Wszystkie główne technologie tego projektu można było wykorzystać do stworzenia pełnowymiarowego transportera rakietowego. Jeszcze przed zakończeniem testów doświadczonego pojazdu terenowego rozpoczęto prace rozwojowe nad pełnoprawnym pojazdem transportowym. W dającej się przewidzieć przyszłości SKB ZIL miał przygotować całą niezbędną dokumentację i rozpocząć przygotowanie budowy prototypu.
Równolegle z tworzeniem nowego przenośnika przeprowadzono projekt „księżycowej” rakiety H-1. Nowy szef programu kosmicznego V.P. Miszyn od pewnego czasu zaczął wątpić w potrzebę rozmieszczenia nowego systemu logistycznego dostarczania pocisków na Bajkonur. Przy wszystkich swoich zaletach transport zestawów rakietowych przez półpustynie i stepy wiązał się z poważnymi trudnościami i ryzykiem. Ponadto projekt przenośnika okazał się zbyt kosztowny i skomplikowany pod względem produkcji i późniejszej eksploatacji.
Pod koniec 1967 roku, krótko po zakończeniu testów makiety ZIL-135Sz, podjęto fundamentalną decyzję o rezygnacji z nowych, nietypowych pojazdów. OKB-1 anulowało zamówienie na stworzenie specjalnego ośmioosiowego transportera. Elementy rakietowe nadal proponowano do transportu koleją. W ten sposób ostatecznie zapewnili dostawę zestawów rakietowych N-1.

Próbka modelu obraca się wokół własnej osi. Zdjęcia Russkaya-sila.rf
Po zakończeniu testów i zamknięciu projektu prawdopodobnie do magazynu trafił jedyny prototyp ZIL-135Sh. Jego dalszy los jest nieznany. Obecnie brak informacji o jego istnieniu. Być może w pewnym momencie został zdemontowany jako niepotrzebny. W muzeach krajowych kilka unikalnych eksperymentalnych pojazdów terenowych opracowanych przez specjalne biuro projektowe fabryki im. A.I. Lichaczew, ale nie ma wśród nich samochodu ZIL-135SH.
Do czasu zakończenia prac projekt pełnowymiarowego przenośnika nie został ukończony. Później, w połowie lat siedemdziesiątych, ponownie pojawiła się kwestia stworzenia superciężkiego transportera dla technologii rakietowej i kosmicznej, ale wtedy postanowiono powierzyć zadanie transportu dużych ładunków specjalnie wyposażonym samolotom. Prace nad specjalnymi podwoziami lądowymi ponownie nie zbliżyły się do praktycznego zastosowania.
Pierwotny prototyp spełnił oczekiwania, ale klient zdecydował się zrezygnować z głównego projektu superciężkiego transportera. W rezultacie motyw ZIL-135Sh nie został opracowany, a jego zmiany w rzeczywistości pozostały nieodebrane. Jednak ten samochód pozostawił po sobie kilka ciekawych tytułów. Prototyp ZIL-135Sh pozostał w Historie jako jeden z najciekawszych samochodów eksperymentalnych w historii rodzimej motoryzacji. Ponadto był to ostatni ośmiokołowy pojazd terenowy pod marką ZIL. Wszystkie poniższe pojazdy terenowe SKB ZIL były wyposażone w trzyosiowe podwozie.
Według materiałów:
http://denisovets.ru/
https://drive2.ru/
https://os1.ru/
http://gruzovikpress.ru/
http://русская-сила.рф/
Kochnev E.D. Tajne samochody Armii Radzieckiej. – M.: Yauza, Eksmo, 2011.
W połowie lat sześćdziesiątych radziecki program kosmiczny napotkał pewne trudności logistyczne. Rakiety kosmiczne zbudowano w zakładach Progress w Kujbyszewie (obecnie Samara), po czym zmontowano je koleją do kosmodromu Bajkonur, gdzie ostatecznie zostały zmontowane i przygotowane do startu. W przypadku rakiet nośnych opartych na platformie R-7 takie metody wyglądały na akceptowalne. Jednak już trwał rozwój „księżycowej” rakiety N-1, która wyróżniała się zwiększonymi wymiarami. Dostawa jego jednostek do kosmodromu wiązała się z poważnymi problemami.
Model ZIL-135Sh na poligonie. Zdjęcia Russkaya-sila.rf
Biorąc pod uwagę alternatywy dla transportu kolejowego, specjaliści OKB-1, na czele z S.P. Korolowom zaoferowano oryginalną wersję dostawy zestawów rakietowych na Bajkonur. Proponowano budowę schodów w Kujbyszewie, po czym miały być one przetransportowane specjalną barką wzdłuż Wołgi i Morza Kaspijskiego do miasta Guryev (obecnie Atyrau w Kazachstanie). Tam planowano przeładować technologię rakietową na specjalne pojazdy i dostarczyć ją drogą lądową do kosmodromu. Do realizacji takiej propozycji konieczne było stworzenie barki rzecznej i pojazdu lądowego o dopuszczalnych parametrach. W przypadku transportu lądowego zadanie konstruktorów komplikował fakt, że poszczególne jednostki przyszłego N-1 mogły ważyć co najmniej 20-25 ton.
Grupa inżynierów OKB-1 kierowana przez V.P. Pietrow stworzył przybliżony obraz przyszłego przenośnika i przedstawił kilka ważnych propozycji. Tak więc, aby zapewnić akceptowalną mobilność i zwrotność, maszyna potrzebowała orientowanych kół typu stosowanego na przednim podwoziu samolotu. Jednocześnie pożądane cechy zdolności przełajowych i mobilności na stepach kazachskiej SRR można było uzyskać tylko za pomocą kół o średnicy co najmniej 1,5 m. Mając takie podwozie, przyszły przenośnik mógłby uzyskać akceptowalne wymiary i pokaż żądaną ładowność.
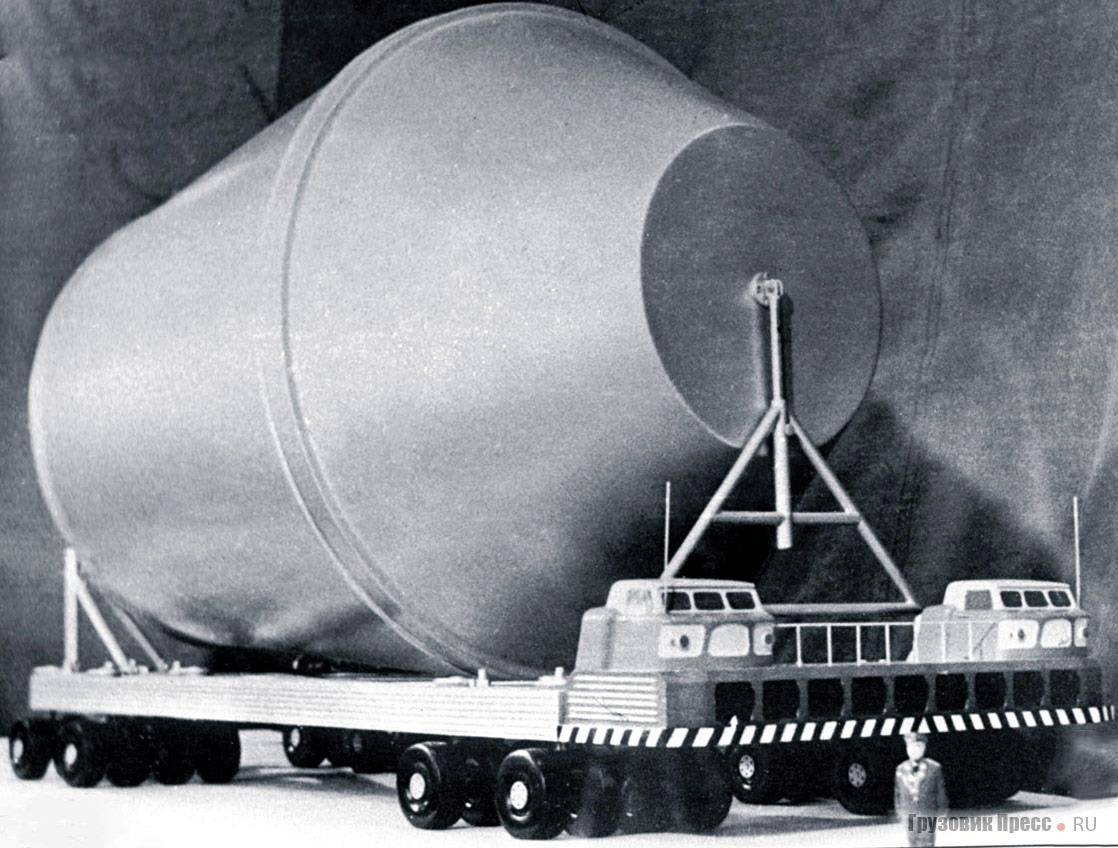
Model przyszłego transportera pełnowymiarowego z ładownością. Zdjęcia gruzovikpress.ru
Po utworzeniu przybliżonego obrazu przyszłego transportera rakietowego OKB-1 rozpoczęło poszukiwania dewelopera pełnoprawnego projektu. Kilka krajowych fabryk samochodów na raz miało niezbędne doświadczenie, ale nie wszystkie z nich były entuzjastycznie nastawione do propozycji projektantów „kosmicznych”. Tak więc Instytut NAMI i Mińska Fabryka Samochodów nie odważyli się uczestniczyć w tak złożonym projekcie, na którego rozwój zresztą nie przeznaczono zbyt wiele czasu.
Sytuację uratował SKB ZIL, na czele z V.A. Grachev. Na spotkaniu poświęconym rozwojowi nowego pojazdu wyraził gotowość stworzenia specjalnego pojazdu zdolnego przewieźć w trudnym terenie ładunek do 100 ton - czterokrotność wymaganego ładunku. Proste obliczenia wykazały, że obiecujący pojazd terenowy byłby w stanie unieść cały drugi lub trzeci stopień rakiety N-1. Większy i cięższy pierwszy stopień można było rozłożyć na zaledwie trzy sekcje.
Tak więc, aby przetransportować wszystkie elementy rakiety na Bajkonur, potrzeba było tylko pięciu lub sześciu lotów przenośnika, po czym można było rozpocząć montaż rakiety. W przypadku transportu kolejowego wymagany był cały rzut, a montaż zająłby znacznie więcej czasu.
Schemat eksperymentalnego ZIL-135Sh. Rysunek Russian-power.rf
Wkrótce pojawiło się wiele dokumentów, które oficjalnie rozpoczęły nowy projekt. SKB ZIL został wyznaczony na głównego dewelopera transportera dla przemysłu kosmicznego. Projektowanie specjalnych systemów elektrycznych powierzono Biuru Projektów Specjalnych Moskiewskiego Zakładu nr 467 im. F.E. Dzierżyński. OKB-1 podjęło się przygotowania SIWZ, koordynacji prac i pomocy administracyjnej.
Na początku 1967 roku kilka przedsiębiorstw wspólnie ukształtowało wizerunek przyszłego przewoźnika. Zaproponowano zbudowanie samochodu z platformą ładunkową o wymiarach 10,8x21,1 m. Podwozie miało mieć konstrukcję ośmioosiową z układem kół 32x32. Zaproponowano montaż kół parami na obrotowych stojakach. W każdym rogu kadłuba umieszczono cztery takie stojaki. Dzięki takiej konstrukcji podwozia możliwe było zapewnienie najwyższej zwrotności. Masa brutto osiągnęłaby 80-100 ton przy ładowności około obiecanych 100 ton.
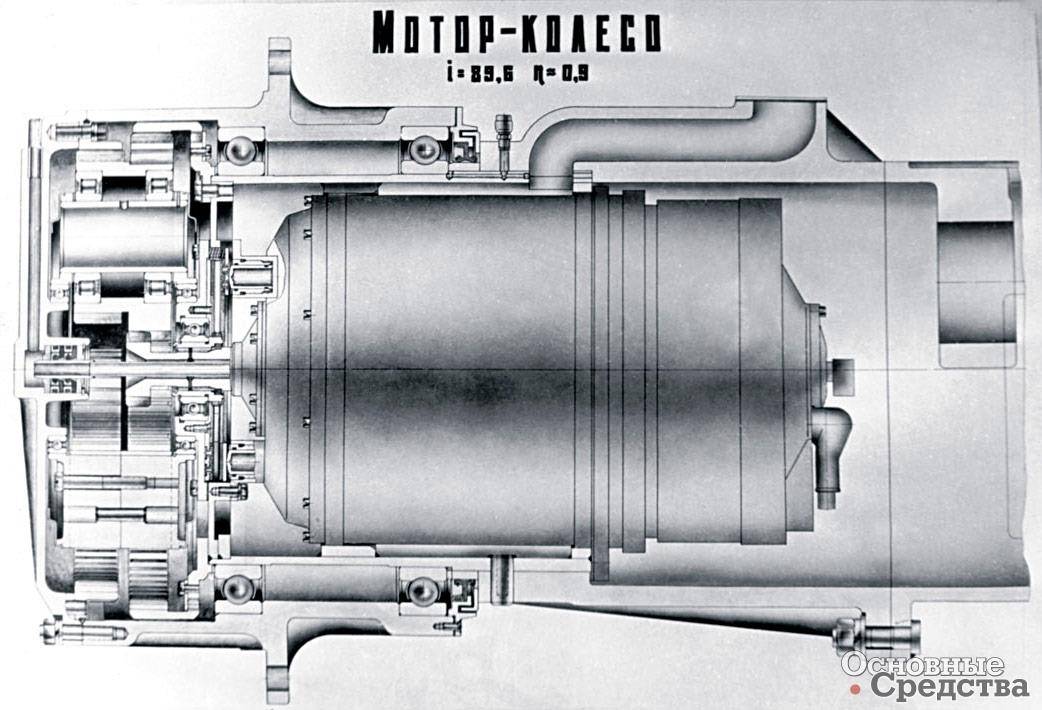
Schemat koła motorowego z silnikiem DT-15M. Rysunek Os1.ru
Oczywistym jest, że budowa doświadczonego przenośnika w pełnej konfiguracji nie miała jeszcze sensu. Przed opracowaniem pełnoprawnego projektu zaproponowano stworzenie, zbudowanie i przetestowanie prototypu w uproszczonej konfiguracji. Z punktu widzenia podwozia ta maszyna miała być jedną ósmą pełnowymiarowego przenośnika. Przy pomocy zredukowanego zestawu sprzętu można było przetestować główne pomysły i rozwiązania, a także wyciągnąć pewne wnioski i dokonać zmian w istniejącym projekcie.
Zaproponowano stworzenie próbki makiety z gotowych komponentów i zespołów. Głównym źródłem komponentów miały być pojazdy terenowe z rodziny ZIL-135. Na przykład przekładnia elektryczna została oparta na jednostkach pojazdu terenowego ZIL-135E. W związku z tym pojazd eksperymentalny oznaczono jako ZIL-135Sh („Podwozie”). Znaleziono również oznaczenie ZIL-135MSh. Należy zauważyć, że część jednostek została zapożyczona z samolotu Ił-18, ale fakt ten nie znalazł odzwierciedlenia w nazwie projektu.
Schemat układu hydropneumatycznego maszyny. Rysunek Os1.ru
W projekcie ZIL-135Sz zaproponowano budowę samobieżnego laboratorium o nietypowej konstrukcji, która ma najpoważniejsze różnice w stosunku do innych ultrawysokich pojazdów terenowych. Cechy szczególne były obecne zarówno w składzie zespołu napędowego lub skrzyni biegów, jak i konstrukcji podwozia. W szczególności ten ostatni miał łączyć tradycyjne jednostki i elementy przyszłego przenośnika „kosmicznego”.
Podstawą maszyny doświadczalnej była rama o złożonym kształcie. Jego przednią i tylną część wykonano na planie prostokąta. Pomiędzy nimi, tuż za kabiną, znajdowały się podłużne dźwigary o profilu w kształcie litery L. Przeznaczone były do montażu specjalnych elementów podwozia. Do zamontowania kabiny proponowano wykorzystać przedni zwis ramy, aw jej tylnej części umieszczono jednocześnie elementy dwóch elektrowni. Umieszczono tam również ciało do przewozu różnych towarów lub mienia.
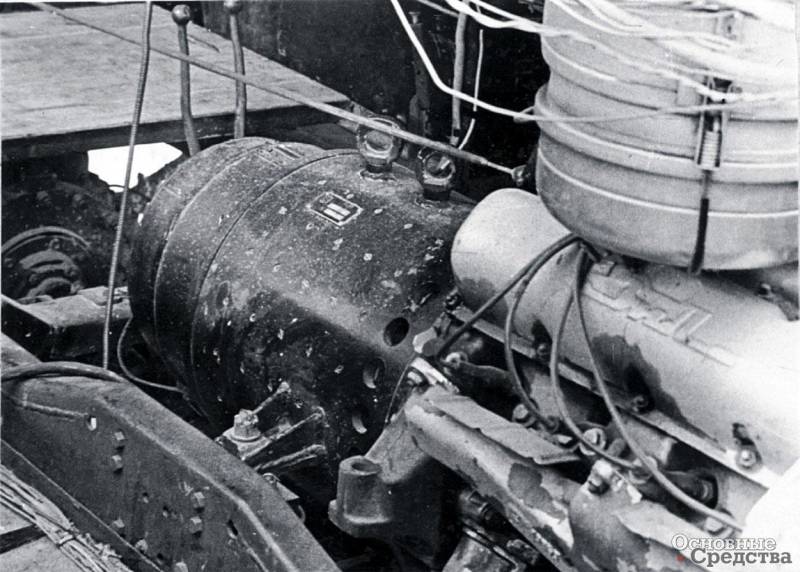
Elektrownia ZIL-135Sh składała się z dwóch silników ZIL-375Ya o mocy 375 KM każdy. Pierwszy silnik znajdował się na tylnym zespole ramy, przed nim. Z tyłu platformy, bezpośrednio nad osią koła, umieszczono drugi silnik. Przedni silnik połączono z prądnicą GET-120 o mocy 120 kW, która stanowiła podstawę przekładni elektrycznej. Drugi silnik został wyposażony w przekładnię hydromechaniczną połączoną z tylną osią napędową. Zgodnie z planem projektantów głównym silnikiem był przedni, będący częścią jednostki benzynowo-elektrycznej. Drugi silnik miał być używany w niektórych sytuacjach, aby zwiększyć ogólną moc maszyny.
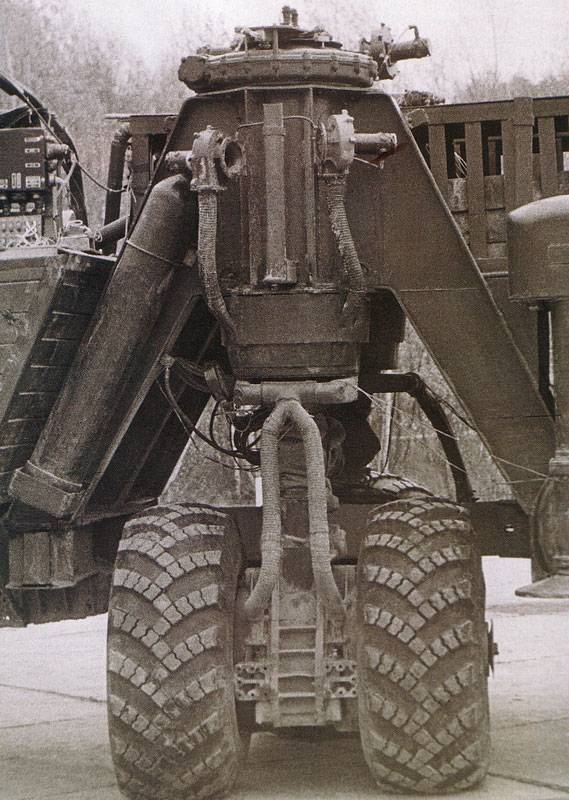
Prawy wspornik koła. Zdjęcie Os1.ru
Na dźwigarach ramy w kształcie litery L zawieszono sprzęt, który był głównym elementem całego eksperymentalnego projektu. Na specjalnych wspornikach pionowych umieszczono dwa stojaki, zbudowane na bazie jednostek samolotu Ił-18. Była pionowa kolumna, która służyła jako hydropneumatyczny amortyzator zawieszenia o skoku 450 mm. Na dźwigarach zamontowano napędy elektryczne, za pomocą których zębatka mogła obracać się wokół osi pionowej, zapewniając manewrowanie. Na dole stojaków znajdowała się para moto-kół.
Zakład nr 476 opracował autorski system synchronicznego serwo do sterowania ruchami regałów. System sterowania umożliwił obrót zębatki pod kątem do 90 ° w prawo i w lewo w dwóch trybach, zgodnie z prawem trapezu lub równoległoboku kierownicy. Przewidziano również możliwość kołowania w obrębie sektora o szerokości 20°. Tryb działania sterów został wybrany przez kierowcę. Przekształcenie kierownicy w polecenia dla napędów zostało zrealizowane przez specjalne urządzenie analogowe, które odbierało dane z szeregu czujników i wysyłało sygnały do siłowników. Takie algorytmy zostały zaimplementowane po raz pierwszy w praktyce krajowej.
Para moto-kół została zamontowana na wspólnym wsporniku w dolnej części zębatki. W piaście każdego z nich znajdował się silnik elektryczny DT-15M DC o mocy 15 kW, połączony z jednostopniową przekładnią planetarną. Koła zostały wyposażone w opony o wymiarach 1200x500x580 mm z rozwiniętym bieżnikiem. Wszystkie cztery koła przednich rozpórek miały scentralizowany system regulacji docisku. Ciśnienie w oponach zmieniało się w granicach 1-3 kg/cmXNUMX.

System kontroli obrotu stojaka. Zdjęcie Os1.ru
Dwa dwukołowe zębatki obrotowe zostały uzupełnione o tylną oś, niezbędną do podparcia ramy we właściwej pozycji. Most z podwójnymi kołami zawieszono na podłużnych sprężynach. Za pomocą przekładni hydromechanicznej moc „tylnego” silnika została przekazana na koła tylnej osi.
Ze względu na specjalną konstrukcję podwozia, układ kół prototypu ZIL-135Sh można określić jako 6x6/4 lub 4x4+2x2. Wszystkie sześć kół samochodu jeździło, ale napęd dwóch tylnych kół można było wyłączyć. Z 6 kół 4 stały się sterowalne i obracały się wraz ze swoimi zębatkami.
W przypadku niektórych testów prototyp ził-135sz był wyposażony w podnośniki hydrauliczne. Kilka takich urządzeń zostało zainstalowanych po bokach przedniej części ramy, bezpośrednio za kabiną. Za pomocą podnośników można było wywiesić przód samochodu, zmieniając obciążenie kół regałów obrotowych.
Punkt mocy. W centrum znajduje się generator GET-120, po prawej silnik ZIL-375 połączony z tylną osią. Zdjęcie Os1.ru
Przedni zwis ramy służył jako podstawa kabiny zapożyczonej z ZIL-135K. Była to jednostka z włókna szklanego z czterema miejscami siedzącymi i widokiem dookoła za pomocą przeszklenia o dużej powierzchni. W związku z zastosowaniem dwóch autonomicznych elektrowni z różnymi opcjami transmisji, kabina otrzymała specjalny zestaw sterowań. Dodatkowa osłona ze sterowaniem systemami elektrycznymi, która była dużych rozmiarów, musiała zostać zamontowana przed prawym miejscem pracy kabiny. Takie podwójne stanowisko kontrolne, które jest bardzo złożone, zapewniało pełną kontrolę nad wszystkimi systemami.
Nad komorą silnika utworzoną przez tylną część ramy zainstalowano szerokie nadwozie boczne. Drewniana przestrzeń ładunkowa o bokach średniej wysokości otrzymała łuki do montażu markizy. Kolejny łuk znajdował się za kabiną i umożliwiał przykrycie dźwigarów rozpórkami skrętnymi z plandeką. Po bokach korpusu znajdowały się drzwi ze stopniami do lądowania. Według doniesień, podczas testów nadwozie służyło do transportu balastu i różnych części materiałowych niezbędnych do testowania sprzętu.
Prototyp ził-135sz miał długość mniejszą niż 9,5 m. Szerokość osiągnęła 3,66 m, wysokość 3,1 m. Masa własna wynosiła 12,9 t. przednia oś utworzona przez parę dwukołowych zębatek. Rozstaw osi prototypu wynosi 12 m. Rozstaw przedniej „osi” wzdłuż środków zębatek wynosił 4,46 m, wzdłuż środków zewnętrznych kół - około półtora raza więcej. Rozstaw osi tylnej - 2 m.

Panel sterowania urządzeniami elektrycznymi. Zdjęcia gruzovikpress.ru
Eksperymentalna maszyna nowego typu, będąca demonstratorem głównej technologii przyszłego „kosmicznego” przenośnika, została zbudowana na początku lata 1967 z maksymalnym wykorzystaniem gotowych komponentów. Pod koniec czerwca samochód został dostarczony na poligon 21. Instytutu Badawczego MON w mieście Bronnitsy. Przez kilka kolejnych miesięcy prototypowy model pracował na poligonie i pokazywał swoje możliwości w warunkach zbliżonych do stepów kazachskiej SRR. Osiągnięto dobre wyniki, a wszystkie nowe jednostki maszyny działały dobrze.
Poruszając się wzdłuż autostrady, ZIL-135Sh przyspieszył do 60 km / h. Średnia prędkość na dobrej drodze była o połowę niższa. Na polnej drodze i łące można było osiągnąć prędkość do 20 km/h, na orce – do 10 km/h. Podczas testów samochód przejechał około 1000 km na różnych nawierzchniach i glebach. Na wszystkich nawierzchniach, także tych o niskiej nośności, pojazd terenowy był pewny siebie. Stwierdzono, że taki przenośnik byłby w stanie normalnie pełnić swoje funkcje w zamierzonych obszarach działania.
Jednym z celów testu było przetestowanie oryginalnego zautomatyzowanego systemu sterowania kołami słupka A. Przy całej swojej złożoności i oczekiwanych zagrożeniach taki sprzęt poradził sobie z powierzonymi mu zadaniami. Automatyka poprawnie opracowywała polecenia z kierownicy i zapewniała wymagane manewrowanie w każdych warunkach. Przy skręcaniu kół kierowanych o 90° udało się uzyskać minimalny promień skrętu (wzdłuż koła zewnętrznego) na poziomie 5,1 m. Auto faktycznie skręcało wokół tylnej osi.

ZIL-135Sh demonstruje zdolność obracania kół o 90 °. Zdjęcia Denisovets.ru
Testy prototypu ZIL-135Sh zakończyły się sukcesem. Wszystkie główne technologie tego projektu można było wykorzystać do stworzenia pełnowymiarowego transportera rakietowego. Jeszcze przed zakończeniem testów doświadczonego pojazdu terenowego rozpoczęto prace rozwojowe nad pełnoprawnym pojazdem transportowym. W dającej się przewidzieć przyszłości SKB ZIL miał przygotować całą niezbędną dokumentację i rozpocząć przygotowanie budowy prototypu.
Równolegle z tworzeniem nowego przenośnika przeprowadzono projekt „księżycowej” rakiety H-1. Nowy szef programu kosmicznego V.P. Miszyn od pewnego czasu zaczął wątpić w potrzebę rozmieszczenia nowego systemu logistycznego dostarczania pocisków na Bajkonur. Przy wszystkich swoich zaletach transport zestawów rakietowych przez półpustynie i stepy wiązał się z poważnymi trudnościami i ryzykiem. Ponadto projekt przenośnika okazał się zbyt kosztowny i skomplikowany pod względem produkcji i późniejszej eksploatacji.
Pod koniec 1967 roku, krótko po zakończeniu testów makiety ZIL-135Sz, podjęto fundamentalną decyzję o rezygnacji z nowych, nietypowych pojazdów. OKB-1 anulowało zamówienie na stworzenie specjalnego ośmioosiowego transportera. Elementy rakietowe nadal proponowano do transportu koleją. W ten sposób ostatecznie zapewnili dostawę zestawów rakietowych N-1.
Próbka modelu obraca się wokół własnej osi. Zdjęcia Russkaya-sila.rf
Po zakończeniu testów i zamknięciu projektu prawdopodobnie do magazynu trafił jedyny prototyp ZIL-135Sh. Jego dalszy los jest nieznany. Obecnie brak informacji o jego istnieniu. Być może w pewnym momencie został zdemontowany jako niepotrzebny. W muzeach krajowych kilka unikalnych eksperymentalnych pojazdów terenowych opracowanych przez specjalne biuro projektowe fabryki im. A.I. Lichaczew, ale nie ma wśród nich samochodu ZIL-135SH.
Do czasu zakończenia prac projekt pełnowymiarowego przenośnika nie został ukończony. Później, w połowie lat siedemdziesiątych, ponownie pojawiła się kwestia stworzenia superciężkiego transportera dla technologii rakietowej i kosmicznej, ale wtedy postanowiono powierzyć zadanie transportu dużych ładunków specjalnie wyposażonym samolotom. Prace nad specjalnymi podwoziami lądowymi ponownie nie zbliżyły się do praktycznego zastosowania.
Pierwotny prototyp spełnił oczekiwania, ale klient zdecydował się zrezygnować z głównego projektu superciężkiego transportera. W rezultacie motyw ZIL-135Sh nie został opracowany, a jego zmiany w rzeczywistości pozostały nieodebrane. Jednak ten samochód pozostawił po sobie kilka ciekawych tytułów. Prototyp ZIL-135Sh pozostał w Historie jako jeden z najciekawszych samochodów eksperymentalnych w historii rodzimej motoryzacji. Ponadto był to ostatni ośmiokołowy pojazd terenowy pod marką ZIL. Wszystkie poniższe pojazdy terenowe SKB ZIL były wyposażone w trzyosiowe podwozie.
Według materiałów:
http://denisovets.ru/
https://drive2.ru/
https://os1.ru/
http://gruzovikpress.ru/
http://русская-сила.рф/
Kochnev E.D. Tajne samochody Armii Radzieckiej. – M.: Yauza, Eksmo, 2011.
informacja