ATV dla astronautów
Specjalne Biuro Projektowe Fabryki Samochodów im. IA Lichaczow początkowo opracował technikę wysokiej zdolności przełajowej tylko w interesie armii. Później podobnymi projektami zainteresowały się inne struktury, w tym przemysł kosmiczny. Kierownictwo tego ostatniego zainicjowało rozwój specjalnych pojazdów terenowych zdolnych do znajdowania lądujących astronautów, ewakuowania ich, a także podnoszenia ich statków kosmicznych. Pierwszym przedstawicielem takiej linii sprzętu specjalnego była maszyna PES-1.
W pierwszych latach rozwoju radziecka kosmonautyka załogowa miała pewne problemy z poszukiwaniem i ewakuacją załóg desantowych. Poszukiwania lądowiska prowadzono za pomocą samolotów i śmigłowców z odpowiednim sprzętem radiowym, po czym na dany obszar powinny przybyć dostępne pojazdy z ratownikami, lekarzami, inżynierami itp. Taki zestaw środków spełniał podstawowe wymagania, ale nie był pozbawiony wad. Na przykład na lądowiskach często występowały warunki pogodowe, które nie latały, a lądowanie astronautów w trudno dostępnym obszarze może poważnie skomplikować pracę ratowników.

Maszyna PES-1 w muzeum. Fot. Państwowe Wojskowe Muzeum Techniki / gvtm.ru
Pod koniec 1964 roku generalny projektant systemów rakietowych i kosmicznych S.P. Korolev wystąpił z propozycją stworzenia specjalnych ultra-wysokich pojazdów terenowych, zdolnych do znajdowania i zabierania astronautów, niezależnie od pogody i miejsca lądowania. Wkrótce propozycja ta przerodziła się w zadanie dla Biura Projektów Specjalnych Zakładu. Lichaczow (SKB ZIL), kierowany przez V.A. Grachev. W grudniu dowództwo Sił Powietrznych zatwierdziło wymagania dla nowego pojazdu ratowniczego i wkrótce sporządzono zakres zadań. Na początku wiosny 1965 roku specjaliści SKB ZIL rozpoczęli projektowanie obiecującej maszyny.
Na długo przed zakończeniem prac rozwojowych praktyka potwierdziła zapotrzebowanie na nowy pojazd terenowy. 19 marca 1965 r. statek kosmiczny Voskhod-2 z uszkodzonym systemem lądowania wylądował w znacznej odległości od obszaru osiedla. Kosmonauci P.I. Bielajew i AA Leonow musiał czekać dwa dni na pomoc w odległym rejonie tajgi. Na szczęście zostali odnalezieni i wywiezieni przez ratunek „na stały ląd” lotnictwo. Ten incydent pokazał, jak użyteczny może być łazik ratunkowy.
Według znanych danych nowy „kosmiczny” projekt SKB ZIL otrzymał dwie nazwy. W dokumentacji fabrycznej pojawiło się oznaczenie ZIL-132K, wskazujące na zastosowanie niektórych rozwiązań już opracowanego projektu. Jednocześnie używano oficjalnej nazwy PES-1 – „Jednostka Poszukiwawczo-Ewakuacyjna, Pierwszy Model”. Później zapomniano o nazwie fabryki i prawie zawsze specjalna maszyna nazywana jest PES-1.
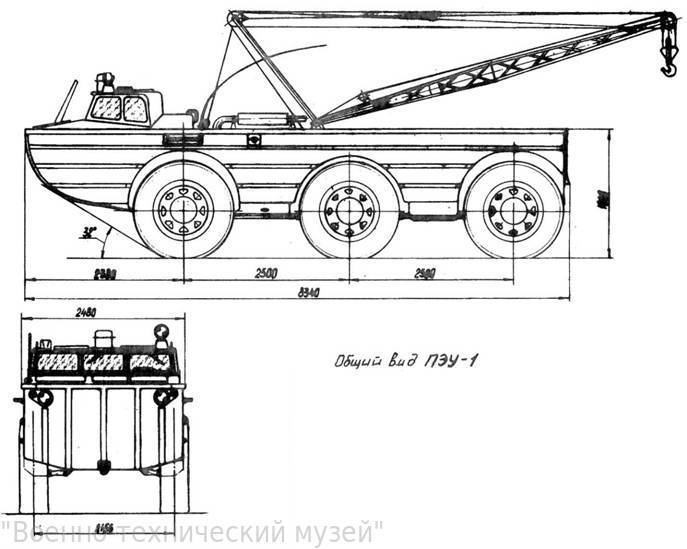
Schemat pojazdu terenowego. Rysunek Państwowego Wojskowego Muzeum Techniki / gvtm.ru
Zgodnie z nowymi pomysłami S.P. Korolow i jego koledzy poszukiwanie pojazdu zstępującego nadal musiało być prowadzone przez lotnictwo. Po ustaleniu przybliżonego miejsca lądowania zaproponowano dostarczenie na miejsce pracy wozu terenowego PES-1. W związku z tym ten ostatni pod względem wymiarów i masy musiał zmieścić się w ograniczeniach przedziałów ładunkowych samolotu An-12 i śmigłowca Mi-6. Samochód miał poruszać się po lądzie i wodzie. Niezbędne było zapewnienie możliwości przewozu osób i ładunku w postaci pojazdu zejściowego. Na pokładzie pojazdu terenowego trzeba było przewieźć dużą ilość różnego sprzętu ratowniczego.
Stworzenie jednostki poszukiwawczo-ewakuacyjnej o określonych cechach i wyglądzie nie było najłatwiejsze, ale projektanci SKB ZIL z powodzeniem sobie z tym poradzili. Mając solidne doświadczenie w projektowaniu i budowie pojazdów terenowych o różnych możliwościach, biuro projektowe było w stanie stworzyć najlepszą wersję pojazdu terenowego, która w pełni spełnia specyfikacje techniczne. Do rozwiązania postawionych zadań konieczne było skorzystanie z gotowych pomysłów, ale wymagało to opracowania szeregu nowych propozycji.
Wynik pracy V.A. Grachev i jego koledzy stali się trzyosiowym pojazdem z napędem na wszystkie koła z rozpoznawalnym typem nadwozia z uszczelnieniem wypornościowym. Na pokładzie PES-1 powinny znajdować się różnorodne instrumenty i urządzenia o różnych funkcjach. Pojazd ratowniczy potrzebował więc specjalnego sprzętu radionawigacyjnego, a do pracy z pojazdami zjazdowymi potrzebował własnego dźwigu i specjalnego urządzenia wspomagającego.

Przód etui z otwartymi pokrywami. W tle widać uchylną osłonę kabiny, na pierwszym planie osłony schowka na sprzęt. Zdjęcie Os1.ru
Po raz pierwszy w praktyce krajowej w projekcie ZIL-132K zastosowano spawaną aluminiową ramę o dużych wymiarach. Rama została złożona z zestawu podłużnych i poprzecznych profili metalowych połączonych szalikami. W centralnej części ramy przewidziano usztywnienie w kształcie litery X, które pozwalało wytrzymać duże obciążenia. Proces opracowywania ramy wymagał stworzenia i wdrożenia nowych technologii montażu wielkogabarytowych obciążonych konstrukcji aluminiowych.
Na zewnątrz aluminiowa rama została pokryta korpusem z włókna szklanego. Wykonano ją w formie dużej wydłużonej wanny z charakterystycznym zaokrąglonym frontem i pionowymi bokami. Ten ostatni miał duże łuki, dzięki czemu koła nie wychodziły poza nadwozie. Za wanną z włókna szklanego znajdował się pionowy rufowy arkusz. Na górze było kilka jednostek. Przed samochodem przewidziano osłonę schowka na sprzęt radiowy z kilkoma włazami; za nim znajdowała się składana czapka kabiny. Za kokpitem znajdowała się płaska platforma na dźwig, a na rufie stosunkowo głębokie nadwozie dla pojazdu zjazdowego.
W związku z zadaniami specjalnymi i specyficznym rozkładem obciążeń PES-1 otrzymał odpowiedni układ. W przedniej części kadłuba znajdował się schowek na instrumenty radionawigacyjne, za pomocą którego proponowano zrównoważyć ciężki ładunek na rufie. Zaraz za nim umieszczono dość dużą kabinę. Za kabiną planowano zainstalować silnik i niektóre urządzenia transmisyjne. W związku z zastosowaniem podwozia z napędem na wszystkie koła, duże objętości musiały zostać przekazane do przekładni w dolnej części kadłuba.
Pojazd terenowy otrzymał silnik benzynowy ZIL-375YA o mocy 180 KM. W niewielkiej komorze silnika, ze względu na ciasny układ, udało się umieścić wszystkie niezbędne urządzenia, w tym zbiornik paliwa o pojemności 365 litrów. Tłumik układu wydechowego został przeniesiony na dach kadłuba. Do silnika podłączona została przekładnia z pokładowym rozdziałem mocy, zbudowana na bazie urządzeń hydromechanicznych i mechanicznych. Część jego jednostek została zapożyczona z pojazdu wojskowego ZIL-135L.

Pojazd terenowy PES-1 na próbach. Zdjęcie Os1.ru
Do silnika podłączono przemiennik momentu obrotowego, a następnie automatyczną skrzynię biegów. Wtedy moment obrotowy spadł na skrzynię rozdzielczą, która rozłożyła go między kołami obu stron i armatką wodną. Wały ze skrzyni rozdzielczej trafiły na środkowe i tylne koła z każdej strony i połączone ze skrzyniami biegów. Za pomocą kilku wałów Cardana moc przeszła z osi środkowej na przednią. Każde koło otrzymało przekładnię kątową i cylindryczną. Aby zwiększyć wyporność, wnęki w skrzyniach biegów można przedmuchać powietrzem.
Pojazd terenowy został wyposażony w trzyosiowe podwozie z kołami o dużej średnicy z połączonym zawieszeniem. Przednia i tylna oś otrzymały niezależne zawieszenie drążka skrętnego, a środkowe koła miały sztywne mocowania. Pierwotnie planowano używać opon do ciągników Ya-175 o średnicy 1523 mm i szerokości 420 mm, ale ze względu na swoje pierwotne przeznaczenie takie produkty nie były w stanie wytrzymać obciążeń podczas jazdy z dużą prędkością. Problem został rozwiązany z pomocą Instytutu Badawczego Przemysłu Oponiarskiego i Dniepropietrowskiego Zakładu Opon. Dzięki wspólnym wysiłkom trzech organizacji powstały nowe opony ID-15 o wymaganym rozmiarze i pożądanych zasobach. Koła PES-1 otrzymały scentralizowany system regulacji ciśnienia w oponach. Pierwsza i trzecia oś były sterowane.
W części rufowej kadłuba znajdował się napęd strugowodny. Okienko wlotowe tego urządzenia zostało umieszczone na dole. Przez owalne okienko na rufie wyrzucany był strumień wody. Sterowanie wektorem ciągu odbywało się za pomocą dwóch piór sterujących umieszczonych wewnątrz kadłuba.
Z przodu kadłuba znajdował się czteromiejscowy kokpit. Kierowca i ratownicy lub astronauci siedzieli na składanych siedzeniach o najprostszej konstrukcji. Zaproponowano wsiadanie do samochodu w niecodzienny sposób. Kabina nie miała drzwi, ale jej górna pokrywa, która znajdowała się powyżej poziomu pokładu kadłuba, mogła być całkowicie złożona i z powrotem. Dodatkowo w dachu przewidziano parę włazów. Opracowane przeszklenia kokpitu zapewniały widoczność we wszystkich kierunkach. Załoga miała na swoim miejscu wszystkie niezbędne kontrole. Kierowca mógł więc sterować pracą podwozia, a pozostali członkowie załogi musieli korzystać ze sprzętu radionawigacyjnego i innych urządzeń.
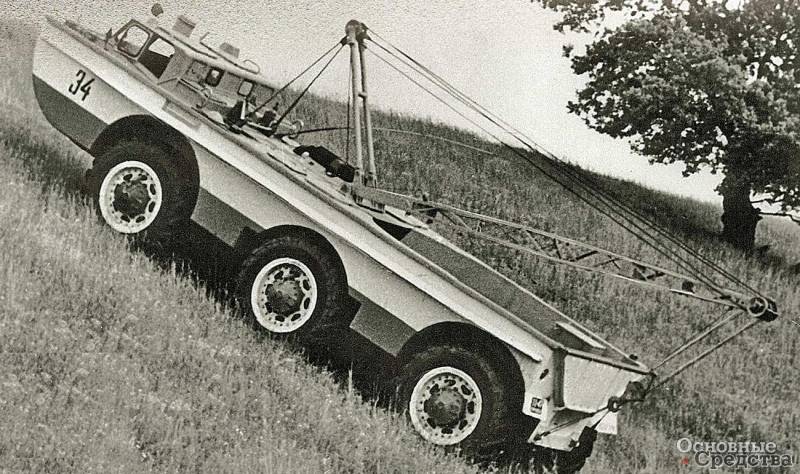
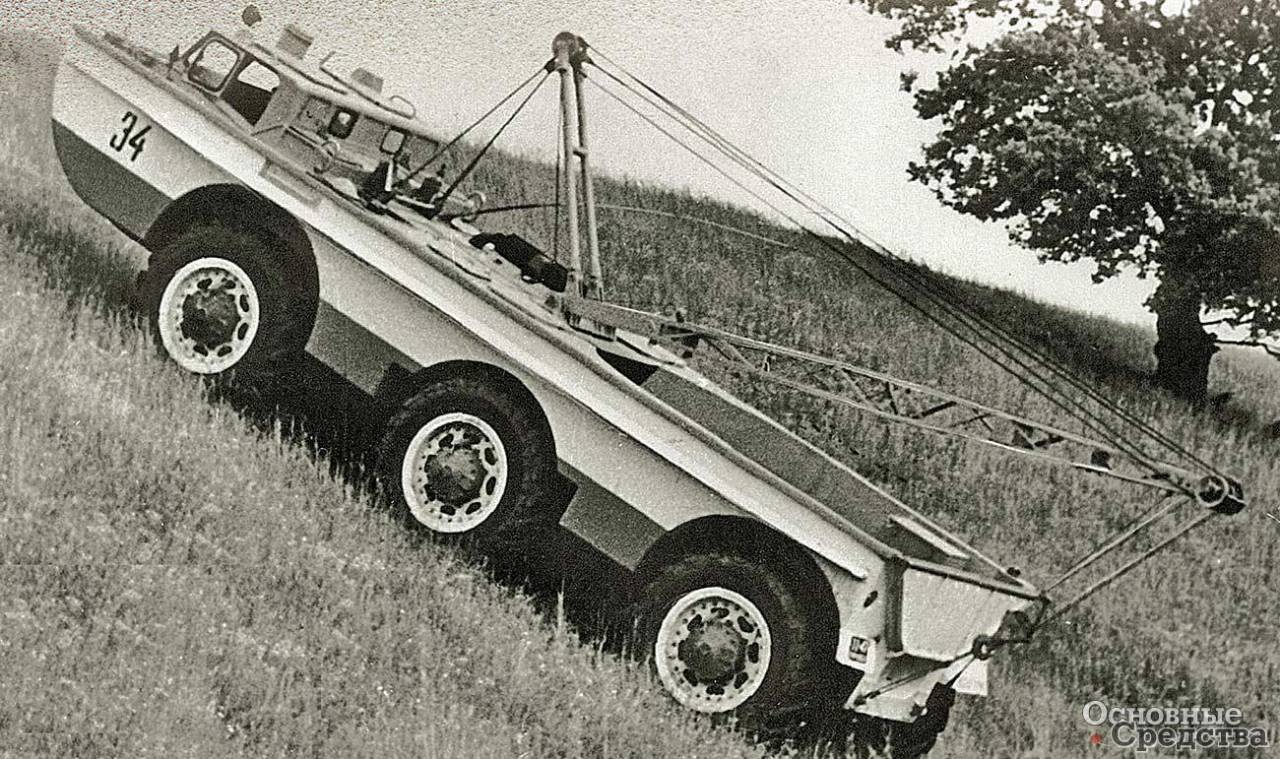
Wspinaczka po stromym zboczu. Zdjęcie Os1.ru
Aby komunikować się z bazą, innymi ratownikami lub astronautami, jednostka poszukiwawczo-ewakuacyjna posiadała parę radiotelefonów R-855U. Dodatkowo do pracy w trudno dostępnych i odległych terenach samochód został wyposażony w sprzęt nawigacyjny. Z jego pomocą załoga mogła monitorować swoją lokalizację, a także udać się do danego punktu. Maksymalny błąd promieniowy podczas nawigacji nie przekroczył 6% przebytej odległości.
Zgodnie z wymaganiami zleceniodawcy PES-1 miał ewakuować nie tylko astronautów, ale także ich pojazd do lądowania. Aby załadować go na pokład, pojazd terenowy otrzymał dźwig. Nad komorą silnika umieszczono wzmocnioną podstawę obrotnicy z wysięgnikiem dźwigu. Ten ostatni został wykonany w formie metalowej kratownicy z windą dzięki linom wyciągarki. Zasięg wysięgnika osiągnął 4,9 m, możliwe było podniesienie go pod kątem do 75°. Udźwig maksymalny 3 t. Obsługę żurawia zapewniała wyciągarka elektryczna typu LPG-GO z dwoma bębnami. Pierwsza odpowiadała za linki sterujące położeniem wysięgnika, natomiast druga linka została wydana do podnoszenia ładunku. Żurawem sterował pilot przewodowy.
Tylna część kadłuba została przekazana pod wpłatę na instalację pojazdu zniżającego. Zaproponowano zainstalowanie statku kosmicznego pionowo na części nośnej o wymaganych kształtach i rozmiarach. Na platformie ładunkowej można było zainstalować kilka rodzajów zabudów, przeznaczonych dla różnych pojazdów zjazdowych. Na wierzch ładunku należy założyć cumę z kompletem rozstępów. Aby ułatwić załadunek i rozładunek, część tylnej klapy kadłuba została składana.

PES-1 z pojazdem zjazdowym. Fot. Państwowe Wojskowe Muzeum Techniki / gvtm.ru
W przypadku pracy z pojazdem schodzącym po wodzie, lewa strona kadłuba otrzymała koło cumownicze. Przed zacumowaniem proponowano założyć na aparacie specjalny nadmuchiwany pas. Holowanie zacumowanego pojazdu zniżającego było dozwolone na falach nie wyższych niż 1 m.
W walizce PES-1 znajdowały się pudła do transportu różnego wyposażenia dodatkowego. Na pokładzie samochodu przechowywano ponton, liny holownicze, narzędzia do okopów, gaśnicę itp. Przewidziano również transport apteczki z niezbędnym zestawem sprzętu i leków.
Dla seryjnych samochodów terenowych nowego modelu opracowano specjalny kolor. Dolna część kadłuba, aż do wodnicy warunkowej, została pomalowana na czerwono. Pozostałe boki, aż do dachu, były z kości słoniowej. Zaproponowano, aby pokład i czapka kokpitu były jasnopomarańczowe. Taka kolorystyka PES-1 zapewniała dobrą widoczność w różnych krajobrazach. Samochód można było łatwo zobaczyć zarówno z powietrza, jak iz ziemi lub z wody.
Maszyna specjalnego przeznaczenia nie miała najmniejszych wymiarów. Długość pojazdu terenowego osiągnęła 8,4 m (w tym żuraw w pozycji złożonej - 9,62 m), szerokość - 2,58 m, wysokość - 2,5 m (z dźwigiem - 3,7 m). Rozstaw osi - 5 m z rozstawem kół 2,5 m. Rozstaw - 2,15 m. Masa własna PES-1 / ZIL-132K określono na poziomie 8,17 t. Ładowność 3 t. Masa całkowita - 11,72 t. Na po autostradzie samochód terenowy mógł osiągać prędkość do 68 km/h. Armatka wodna zapewniała przyspieszenie do 7-7,5 km/h. Zasięg paliwa wynosił 560 km.

Kosmonauci badają nową jednostkę poszukiwawczo-ewakuacyjną, 1966. Fot. Państwowe Wojskowe Muzeum Techniki / gvtm.ru
Trzyosiowe podwozie z kołami o dużej średnicy zapewniało dużą zwrotność na wszelkich nawierzchniach i terenach. Z ładunkiem pojazd terenowy mógł wspinać się na zbocze o nachyleniu 30 ° i poruszać się z przechyleniem do 22 °. Minimalny promień skrętu zapewniany przez parę sterowanych osi nie przekraczał 10 m.
Projektantom SKB ZIL udało się pomyślnie rozwiązać zadania, ale zajęło to dużo czasu. Pierwszy prototyp maszyny ZIL-132K / PES-1 zbudowano dopiero latem 1966 roku - około półtora roku po otrzymaniu odpowiedniego zadania. Prototyp został natychmiast wysłany do testów fabrycznych. Następnie pokazano go przedstawicielom branży kosmicznej. Między innymi kosmonauci Yu.A. Gagarina i AA Leonow. Przedstawiciele klienta wysoko ocenili nowy pojazd terenowy.
W 1967 Zakład im. Lichaczow zbudował drugą eksperymentalną jednostkę poszukiwawczo-ewakuacyjną. Do tego czasu większość niedociągnięć projektu została wyeliminowana, a oba prototypy wkrótce weszły do testów państwowych. Kontrole dwóch PES-1 przeprowadzono na różnych dystansach i trasach w różnych regionach Związku Radzieckiego. Technikę przetestowano praktycznie w każdych warunkach, w jakich mogła spaść w trakcie dalszej służby. We wszystkich przypadkach pojazdy terenowe działały dobrze i potwierdziły obliczoną charakterystykę.

Samochód terenowy PEU-1M „Salon”. Fot. Państwowe Wojskowe Muzeum Techniki / gvtm.ru
W następnym roku, 1968, ZIL przekazał siłom powietrznym początkową partię pięciu nowych, specjalnych pojazdów. Od pewnego czasu jednostki poszukiwawczo-ratownicze Sił Powietrznych badają i doskonalą nowy sprzęt. W sierpniu 1969 roku pojawił się rozkaz, zgodnie z którym PES-1 został przyjęty na zaopatrzenie sił zbrojnych. Teraz nowa technologia – zarówno już zbudowana, jak i planowana na zamówienie – miała stać się pełnoprawnym elementem systemu poszukiwania i ewakuacji astronautów.
Pojazdy ratownicze PES-1 były najważniejszym elementem programu kosmicznego, ale nie planowano ich budowy w dużej serii. Przez kilka lat wyprodukowano tylko 13 takich maszyn, w tym dwa prototypy. Mimo niezbyt dużej liczby takie pojazdy terenowe aktywnie uczestniczyły w lotach kosmicznych i wniosły znaczący wkład w rozwój kosmosu bliskiego Ziemi.
Na początku lat siedemdziesiątych przemysł kosmiczny stworzył nowe wymagania dotyczące sprzętu specjalnego. Rozmiar statku kosmicznego stopniowo rósł, rosła liczba załogi. Wydłużenie czasu lotu spowodowało potrzebę specjalnej pomocy. Istniejący PES-1 nie mógł w pełni sprostać nowym zadaniom w kontekście ratowania astronautów.

Samochód osobowy, widok z tyłu. Zdjęcie Os1.ru
W 1972 roku SKB ZIL opracował nową wersję jednostki poszukiwawczo-ewakuacyjnej o nazwie PES-1M. Projekt modernizacji obejmował demontaż żurawia i kołyski rufowej. Zamiast tego na kadłubie umieszczono izolowaną włóknem szklanym kabinę z siedzeniami dla astronautów, lekarzy itp. Nowa duża kabina zajmowała ponad połowę całkowitej długości maszyny, ale nie zwiększała jej wysokości. Instalacja nowej kabiny spowodowała konieczność dodania kilku innych jednostek.
Kabina z włókna szklanego nowego projektu otrzymała kilka bocznych okien, górne włazy i tylne drzwi do lądowania. Ze względu na dużą wysokość podwozia obok drzwi znajdowała się składana drabina. W podłodze znajdowały się włazy umożliwiające dostęp do jednostek transmisyjnych. W kabinie pasażerskiej umieszczono trzy pojedyncze fotele. Kolejne sześć siedzeń miało podwójną konstrukcję i można je było przeznaczyć na montaż noszy. Zainstalowano trzy szafki do przewożenia różnego mienia, stół z szufladą itp. Załoga miała do dyspozycji umywalkę, gaśnice, aparaty do sztucznego oddychania, zestawy do zakraplania, różne lekarstwa i inny sprzęt.
Zaproponowano wyposażenie kabiny pasażerskiej w środki wentylacji i ogrzewania. Ogrzewanie zapewniała autonomiczna grzałka zasilana benzyną. Do jego działania konieczne było zapewnienie dodatkowego zbiornika paliwa o pojemności 110 litrów. W razie potrzeby zbiornik ten został podłączony do układu paliwowego pojazdu, co zwiększyło zasięg do 700 km.
Po niezbędnych testach przyjęto do zaopatrzenia jednostkę poszukiwawczo-ewakuacyjną PEU-1M. Odpowiednie zamówienie pojawiło się w 1974 roku. W ciągu następnych kilku lat zakład rozwojowy zbudował i przekazał Siłom Powietrznym sześć takich maszyn. Wiadomo, że wkrótce po pojawieniu się nowej maszyny specjalnej, sprzęt rodziny PES-1 otrzymał nieoficjalne przezwiska. Podstawowy pojazd terenowy nosił przydomek „Żuraw”, a modyfikacja pasażerska została oznaczona jako „Salon”.

Pojazd zjazdowy typu Yantar-2, który miał być przewożony na pojazdach PES-1B. Fot. Wikimedia Commons
Praktyka dość szybko pokazała pełny potencjał zaktualizowanego kompleksu poszukiwawczo-ratowniczego. Pracując razem, PES-1 i PES-1M wykazały znakomite wyniki. Dwa samochody mogłyby szybko rozwiązać problem odnalezienia lądujących astronautów i przystąpić do ich ewakuacji. „Salon” mógł zabrać na pokład astronautów i nie czekając na zakończenie prac z pojazdem zniżającym, wrócić z powrotem. Jednocześnie, w przeciwieństwie do podstawowego „Żurawia”, przewoził astronautów w komfortowych warunkach.
W 1974 roku powstał nowy model technologii, który pojawił się dzięki postępowi w dziedzinie statków kosmicznych. Do eksploatacji przygotowywano nowe satelity rozpoznawcze projektu Yantar. Ich pojazd zjazdowy, który dostarczał na Ziemię filmy z obrazami danych terytoriów, różnił się od istniejących produktów swego rodzaju dużymi rozmiarami. Istniejące maszyny PES-1 nie mogły być używane z takimi urządzeniami.
Aby rozwiązać ten problem, opracowano maszynę PEU-1B. Różniła się od podstawowej próbki jedynie konstrukcją żurawia i kołyski. Wysięgnik dźwigu został wydłużony do 5,5 m, a podpora pojazdu zjazdowego została przeprojektowana zgodnie z wymaganiami nowego udźwigu. Eksploatację takiego sprzętu rozpoczęto w 1977 roku. Satelity serii Yantar miały być budowane w dużych seriach i często startowane, ale siły powietrzne zamówiły do współpracy tylko trzy pojazdy terenowe.
Produkcja seryjna maszyn specjalnych rodziny PES-1 trwała do 1979 roku. W tym czasie zbudowano tylko 22 pojazdy terenowe z różnym wyposażeniem. Najbardziej masywną wersją był podstawowy „Żuraw” - 13 jednostek. Liczba "Salonów" była prawie o połowę mniejsza - tylko 6 sztuk. Trzy PES-1B z wysuniętym wysięgnikiem dźwigu opuściły halę montażową jako ostatnie.

PES-1 w muzeum pod Moskwą. Fot. Państwowe Wojskowe Muzeum Techniki / gvtm.ru
Aktywna eksploatacja sprzętu rodziny PES-1 trwała do pierwszej połowy lat osiemdziesiątych. W tym okresie SKB Plant im. Lichaczow opracował i wprowadził do masowej produkcji nowe modele specjalnych maszyn do startów w kosmos. Maszyny te wchodziły w skład kompleksu poszukiwawczo-ewakuacyjnego PEK-490. Później nadano im powszechny przydomek „Niebieski Ptak”. Ponadto opracowano inne projekty, zarówno z rezerwą do zastosowań praktycznych, jak i eksperymentalnym. Na przykład prototyp PES-1R różnił się od maszyn podstawowych obecnością dodatkowej elektrowni odrzutowej, zaprojektowanej w celu zwiększenia zdolności przełajowych.
Instalacje poszukiwawczo-ewakuacyjne rodziny PES-1 nie były masywne, a poza tym dość dawno zostały wycofane z eksploatacji. W ciągu ostatnich dziesięcioleci prawie wszystkie takie maszyny zostały zutylizowane. Na szczęście kilka najciekawszych pojazdów terenowych uniknęło tego losu. Tak więc w Państwowym Wojskowym Muzeum Technicznym (wieś Iwanowskie, obwód moskiewski) znajduje się odrestaurowany model maszyny PES-1 typu „Żuraw”. Ten wyjątkowy eksponat jest pokazywany wraz z innymi ciekawymi opracowaniami SKB ZIL.
Rozwój załogowej astronautyki doprowadził do powstania nowych wymagań dla systemów naziemnych. Wśród innych próbek z branży potrzebne były specjalne pojazdy, które mogłyby znaleźć i zabrać astronautów i ich pojazd do lądowania z odległego obszaru. Już w połowie lat sześćdziesiątych problem ten został pomyślnie rozwiązany. Kompleks PES-1 stał się pierwszym tego typu przykładem w naszym kraju. Następnie na podstawie jego pomysłów i rozwiązań powstały nowe próbki o podobnym przeznaczeniu, które wciąż zapewniają szybki i bezpieczny powrót astronautów do domu.
Według materiałów:
http://gvtm.ru/
http://os1.ru/
http://denisovets.ru/
http://русская-сила.рф/
http://novosti-kosmonavtiki.ru/
Daniłow R.G. Maszyna dla astronautów // Sprzęt i broń, 2010. Nr 8.
W pierwszych latach rozwoju radziecka kosmonautyka załogowa miała pewne problemy z poszukiwaniem i ewakuacją załóg desantowych. Poszukiwania lądowiska prowadzono za pomocą samolotów i śmigłowców z odpowiednim sprzętem radiowym, po czym na dany obszar powinny przybyć dostępne pojazdy z ratownikami, lekarzami, inżynierami itp. Taki zestaw środków spełniał podstawowe wymagania, ale nie był pozbawiony wad. Na przykład na lądowiskach często występowały warunki pogodowe, które nie latały, a lądowanie astronautów w trudno dostępnym obszarze może poważnie skomplikować pracę ratowników.

Maszyna PES-1 w muzeum. Fot. Państwowe Wojskowe Muzeum Techniki / gvtm.ru
Pod koniec 1964 roku generalny projektant systemów rakietowych i kosmicznych S.P. Korolev wystąpił z propozycją stworzenia specjalnych ultra-wysokich pojazdów terenowych, zdolnych do znajdowania i zabierania astronautów, niezależnie od pogody i miejsca lądowania. Wkrótce propozycja ta przerodziła się w zadanie dla Biura Projektów Specjalnych Zakładu. Lichaczow (SKB ZIL), kierowany przez V.A. Grachev. W grudniu dowództwo Sił Powietrznych zatwierdziło wymagania dla nowego pojazdu ratowniczego i wkrótce sporządzono zakres zadań. Na początku wiosny 1965 roku specjaliści SKB ZIL rozpoczęli projektowanie obiecującej maszyny.
Na długo przed zakończeniem prac rozwojowych praktyka potwierdziła zapotrzebowanie na nowy pojazd terenowy. 19 marca 1965 r. statek kosmiczny Voskhod-2 z uszkodzonym systemem lądowania wylądował w znacznej odległości od obszaru osiedla. Kosmonauci P.I. Bielajew i AA Leonow musiał czekać dwa dni na pomoc w odległym rejonie tajgi. Na szczęście zostali odnalezieni i wywiezieni przez ratunek „na stały ląd” lotnictwo. Ten incydent pokazał, jak użyteczny może być łazik ratunkowy.
Według znanych danych nowy „kosmiczny” projekt SKB ZIL otrzymał dwie nazwy. W dokumentacji fabrycznej pojawiło się oznaczenie ZIL-132K, wskazujące na zastosowanie niektórych rozwiązań już opracowanego projektu. Jednocześnie używano oficjalnej nazwy PES-1 – „Jednostka Poszukiwawczo-Ewakuacyjna, Pierwszy Model”. Później zapomniano o nazwie fabryki i prawie zawsze specjalna maszyna nazywana jest PES-1.
Schemat pojazdu terenowego. Rysunek Państwowego Wojskowego Muzeum Techniki / gvtm.ru
Zgodnie z nowymi pomysłami S.P. Korolow i jego koledzy poszukiwanie pojazdu zstępującego nadal musiało być prowadzone przez lotnictwo. Po ustaleniu przybliżonego miejsca lądowania zaproponowano dostarczenie na miejsce pracy wozu terenowego PES-1. W związku z tym ten ostatni pod względem wymiarów i masy musiał zmieścić się w ograniczeniach przedziałów ładunkowych samolotu An-12 i śmigłowca Mi-6. Samochód miał poruszać się po lądzie i wodzie. Niezbędne było zapewnienie możliwości przewozu osób i ładunku w postaci pojazdu zejściowego. Na pokładzie pojazdu terenowego trzeba było przewieźć dużą ilość różnego sprzętu ratowniczego.
Stworzenie jednostki poszukiwawczo-ewakuacyjnej o określonych cechach i wyglądzie nie było najłatwiejsze, ale projektanci SKB ZIL z powodzeniem sobie z tym poradzili. Mając solidne doświadczenie w projektowaniu i budowie pojazdów terenowych o różnych możliwościach, biuro projektowe było w stanie stworzyć najlepszą wersję pojazdu terenowego, która w pełni spełnia specyfikacje techniczne. Do rozwiązania postawionych zadań konieczne było skorzystanie z gotowych pomysłów, ale wymagało to opracowania szeregu nowych propozycji.
Wynik pracy V.A. Grachev i jego koledzy stali się trzyosiowym pojazdem z napędem na wszystkie koła z rozpoznawalnym typem nadwozia z uszczelnieniem wypornościowym. Na pokładzie PES-1 powinny znajdować się różnorodne instrumenty i urządzenia o różnych funkcjach. Pojazd ratowniczy potrzebował więc specjalnego sprzętu radionawigacyjnego, a do pracy z pojazdami zjazdowymi potrzebował własnego dźwigu i specjalnego urządzenia wspomagającego.

Przód etui z otwartymi pokrywami. W tle widać uchylną osłonę kabiny, na pierwszym planie osłony schowka na sprzęt. Zdjęcie Os1.ru
Po raz pierwszy w praktyce krajowej w projekcie ZIL-132K zastosowano spawaną aluminiową ramę o dużych wymiarach. Rama została złożona z zestawu podłużnych i poprzecznych profili metalowych połączonych szalikami. W centralnej części ramy przewidziano usztywnienie w kształcie litery X, które pozwalało wytrzymać duże obciążenia. Proces opracowywania ramy wymagał stworzenia i wdrożenia nowych technologii montażu wielkogabarytowych obciążonych konstrukcji aluminiowych.
Na zewnątrz aluminiowa rama została pokryta korpusem z włókna szklanego. Wykonano ją w formie dużej wydłużonej wanny z charakterystycznym zaokrąglonym frontem i pionowymi bokami. Ten ostatni miał duże łuki, dzięki czemu koła nie wychodziły poza nadwozie. Za wanną z włókna szklanego znajdował się pionowy rufowy arkusz. Na górze było kilka jednostek. Przed samochodem przewidziano osłonę schowka na sprzęt radiowy z kilkoma włazami; za nim znajdowała się składana czapka kabiny. Za kokpitem znajdowała się płaska platforma na dźwig, a na rufie stosunkowo głębokie nadwozie dla pojazdu zjazdowego.
W związku z zadaniami specjalnymi i specyficznym rozkładem obciążeń PES-1 otrzymał odpowiedni układ. W przedniej części kadłuba znajdował się schowek na instrumenty radionawigacyjne, za pomocą którego proponowano zrównoważyć ciężki ładunek na rufie. Zaraz za nim umieszczono dość dużą kabinę. Za kabiną planowano zainstalować silnik i niektóre urządzenia transmisyjne. W związku z zastosowaniem podwozia z napędem na wszystkie koła, duże objętości musiały zostać przekazane do przekładni w dolnej części kadłuba.
Pojazd terenowy otrzymał silnik benzynowy ZIL-375YA o mocy 180 KM. W niewielkiej komorze silnika, ze względu na ciasny układ, udało się umieścić wszystkie niezbędne urządzenia, w tym zbiornik paliwa o pojemności 365 litrów. Tłumik układu wydechowego został przeniesiony na dach kadłuba. Do silnika podłączona została przekładnia z pokładowym rozdziałem mocy, zbudowana na bazie urządzeń hydromechanicznych i mechanicznych. Część jego jednostek została zapożyczona z pojazdu wojskowego ZIL-135L.
Pojazd terenowy PES-1 na próbach. Zdjęcie Os1.ru
Do silnika podłączono przemiennik momentu obrotowego, a następnie automatyczną skrzynię biegów. Wtedy moment obrotowy spadł na skrzynię rozdzielczą, która rozłożyła go między kołami obu stron i armatką wodną. Wały ze skrzyni rozdzielczej trafiły na środkowe i tylne koła z każdej strony i połączone ze skrzyniami biegów. Za pomocą kilku wałów Cardana moc przeszła z osi środkowej na przednią. Każde koło otrzymało przekładnię kątową i cylindryczną. Aby zwiększyć wyporność, wnęki w skrzyniach biegów można przedmuchać powietrzem.
Pojazd terenowy został wyposażony w trzyosiowe podwozie z kołami o dużej średnicy z połączonym zawieszeniem. Przednia i tylna oś otrzymały niezależne zawieszenie drążka skrętnego, a środkowe koła miały sztywne mocowania. Pierwotnie planowano używać opon do ciągników Ya-175 o średnicy 1523 mm i szerokości 420 mm, ale ze względu na swoje pierwotne przeznaczenie takie produkty nie były w stanie wytrzymać obciążeń podczas jazdy z dużą prędkością. Problem został rozwiązany z pomocą Instytutu Badawczego Przemysłu Oponiarskiego i Dniepropietrowskiego Zakładu Opon. Dzięki wspólnym wysiłkom trzech organizacji powstały nowe opony ID-15 o wymaganym rozmiarze i pożądanych zasobach. Koła PES-1 otrzymały scentralizowany system regulacji ciśnienia w oponach. Pierwsza i trzecia oś były sterowane.
W części rufowej kadłuba znajdował się napęd strugowodny. Okienko wlotowe tego urządzenia zostało umieszczone na dole. Przez owalne okienko na rufie wyrzucany był strumień wody. Sterowanie wektorem ciągu odbywało się za pomocą dwóch piór sterujących umieszczonych wewnątrz kadłuba.
Z przodu kadłuba znajdował się czteromiejscowy kokpit. Kierowca i ratownicy lub astronauci siedzieli na składanych siedzeniach o najprostszej konstrukcji. Zaproponowano wsiadanie do samochodu w niecodzienny sposób. Kabina nie miała drzwi, ale jej górna pokrywa, która znajdowała się powyżej poziomu pokładu kadłuba, mogła być całkowicie złożona i z powrotem. Dodatkowo w dachu przewidziano parę włazów. Opracowane przeszklenia kokpitu zapewniały widoczność we wszystkich kierunkach. Załoga miała na swoim miejscu wszystkie niezbędne kontrole. Kierowca mógł więc sterować pracą podwozia, a pozostali członkowie załogi musieli korzystać ze sprzętu radionawigacyjnego i innych urządzeń.
Wspinaczka po stromym zboczu. Zdjęcie Os1.ru
Aby komunikować się z bazą, innymi ratownikami lub astronautami, jednostka poszukiwawczo-ewakuacyjna posiadała parę radiotelefonów R-855U. Dodatkowo do pracy w trudno dostępnych i odległych terenach samochód został wyposażony w sprzęt nawigacyjny. Z jego pomocą załoga mogła monitorować swoją lokalizację, a także udać się do danego punktu. Maksymalny błąd promieniowy podczas nawigacji nie przekroczył 6% przebytej odległości.
Zgodnie z wymaganiami zleceniodawcy PES-1 miał ewakuować nie tylko astronautów, ale także ich pojazd do lądowania. Aby załadować go na pokład, pojazd terenowy otrzymał dźwig. Nad komorą silnika umieszczono wzmocnioną podstawę obrotnicy z wysięgnikiem dźwigu. Ten ostatni został wykonany w formie metalowej kratownicy z windą dzięki linom wyciągarki. Zasięg wysięgnika osiągnął 4,9 m, możliwe było podniesienie go pod kątem do 75°. Udźwig maksymalny 3 t. Obsługę żurawia zapewniała wyciągarka elektryczna typu LPG-GO z dwoma bębnami. Pierwsza odpowiadała za linki sterujące położeniem wysięgnika, natomiast druga linka została wydana do podnoszenia ładunku. Żurawem sterował pilot przewodowy.
Tylna część kadłuba została przekazana pod wpłatę na instalację pojazdu zniżającego. Zaproponowano zainstalowanie statku kosmicznego pionowo na części nośnej o wymaganych kształtach i rozmiarach. Na platformie ładunkowej można było zainstalować kilka rodzajów zabudów, przeznaczonych dla różnych pojazdów zjazdowych. Na wierzch ładunku należy założyć cumę z kompletem rozstępów. Aby ułatwić załadunek i rozładunek, część tylnej klapy kadłuba została składana.

PES-1 z pojazdem zjazdowym. Fot. Państwowe Wojskowe Muzeum Techniki / gvtm.ru
W przypadku pracy z pojazdem schodzącym po wodzie, lewa strona kadłuba otrzymała koło cumownicze. Przed zacumowaniem proponowano założyć na aparacie specjalny nadmuchiwany pas. Holowanie zacumowanego pojazdu zniżającego było dozwolone na falach nie wyższych niż 1 m.
W walizce PES-1 znajdowały się pudła do transportu różnego wyposażenia dodatkowego. Na pokładzie samochodu przechowywano ponton, liny holownicze, narzędzia do okopów, gaśnicę itp. Przewidziano również transport apteczki z niezbędnym zestawem sprzętu i leków.
Dla seryjnych samochodów terenowych nowego modelu opracowano specjalny kolor. Dolna część kadłuba, aż do wodnicy warunkowej, została pomalowana na czerwono. Pozostałe boki, aż do dachu, były z kości słoniowej. Zaproponowano, aby pokład i czapka kokpitu były jasnopomarańczowe. Taka kolorystyka PES-1 zapewniała dobrą widoczność w różnych krajobrazach. Samochód można było łatwo zobaczyć zarówno z powietrza, jak iz ziemi lub z wody.
Maszyna specjalnego przeznaczenia nie miała najmniejszych wymiarów. Długość pojazdu terenowego osiągnęła 8,4 m (w tym żuraw w pozycji złożonej - 9,62 m), szerokość - 2,58 m, wysokość - 2,5 m (z dźwigiem - 3,7 m). Rozstaw osi - 5 m z rozstawem kół 2,5 m. Rozstaw - 2,15 m. Masa własna PES-1 / ZIL-132K określono na poziomie 8,17 t. Ładowność 3 t. Masa całkowita - 11,72 t. Na po autostradzie samochód terenowy mógł osiągać prędkość do 68 km/h. Armatka wodna zapewniała przyspieszenie do 7-7,5 km/h. Zasięg paliwa wynosił 560 km.
Kosmonauci badają nową jednostkę poszukiwawczo-ewakuacyjną, 1966. Fot. Państwowe Wojskowe Muzeum Techniki / gvtm.ru
Trzyosiowe podwozie z kołami o dużej średnicy zapewniało dużą zwrotność na wszelkich nawierzchniach i terenach. Z ładunkiem pojazd terenowy mógł wspinać się na zbocze o nachyleniu 30 ° i poruszać się z przechyleniem do 22 °. Minimalny promień skrętu zapewniany przez parę sterowanych osi nie przekraczał 10 m.
Projektantom SKB ZIL udało się pomyślnie rozwiązać zadania, ale zajęło to dużo czasu. Pierwszy prototyp maszyny ZIL-132K / PES-1 zbudowano dopiero latem 1966 roku - około półtora roku po otrzymaniu odpowiedniego zadania. Prototyp został natychmiast wysłany do testów fabrycznych. Następnie pokazano go przedstawicielom branży kosmicznej. Między innymi kosmonauci Yu.A. Gagarina i AA Leonow. Przedstawiciele klienta wysoko ocenili nowy pojazd terenowy.
W 1967 Zakład im. Lichaczow zbudował drugą eksperymentalną jednostkę poszukiwawczo-ewakuacyjną. Do tego czasu większość niedociągnięć projektu została wyeliminowana, a oba prototypy wkrótce weszły do testów państwowych. Kontrole dwóch PES-1 przeprowadzono na różnych dystansach i trasach w różnych regionach Związku Radzieckiego. Technikę przetestowano praktycznie w każdych warunkach, w jakich mogła spaść w trakcie dalszej służby. We wszystkich przypadkach pojazdy terenowe działały dobrze i potwierdziły obliczoną charakterystykę.

Samochód terenowy PEU-1M „Salon”. Fot. Państwowe Wojskowe Muzeum Techniki / gvtm.ru
W następnym roku, 1968, ZIL przekazał siłom powietrznym początkową partię pięciu nowych, specjalnych pojazdów. Od pewnego czasu jednostki poszukiwawczo-ratownicze Sił Powietrznych badają i doskonalą nowy sprzęt. W sierpniu 1969 roku pojawił się rozkaz, zgodnie z którym PES-1 został przyjęty na zaopatrzenie sił zbrojnych. Teraz nowa technologia – zarówno już zbudowana, jak i planowana na zamówienie – miała stać się pełnoprawnym elementem systemu poszukiwania i ewakuacji astronautów.
Pojazdy ratownicze PES-1 były najważniejszym elementem programu kosmicznego, ale nie planowano ich budowy w dużej serii. Przez kilka lat wyprodukowano tylko 13 takich maszyn, w tym dwa prototypy. Mimo niezbyt dużej liczby takie pojazdy terenowe aktywnie uczestniczyły w lotach kosmicznych i wniosły znaczący wkład w rozwój kosmosu bliskiego Ziemi.
Na początku lat siedemdziesiątych przemysł kosmiczny stworzył nowe wymagania dotyczące sprzętu specjalnego. Rozmiar statku kosmicznego stopniowo rósł, rosła liczba załogi. Wydłużenie czasu lotu spowodowało potrzebę specjalnej pomocy. Istniejący PES-1 nie mógł w pełni sprostać nowym zadaniom w kontekście ratowania astronautów.

Samochód osobowy, widok z tyłu. Zdjęcie Os1.ru
W 1972 roku SKB ZIL opracował nową wersję jednostki poszukiwawczo-ewakuacyjnej o nazwie PES-1M. Projekt modernizacji obejmował demontaż żurawia i kołyski rufowej. Zamiast tego na kadłubie umieszczono izolowaną włóknem szklanym kabinę z siedzeniami dla astronautów, lekarzy itp. Nowa duża kabina zajmowała ponad połowę całkowitej długości maszyny, ale nie zwiększała jej wysokości. Instalacja nowej kabiny spowodowała konieczność dodania kilku innych jednostek.
Kabina z włókna szklanego nowego projektu otrzymała kilka bocznych okien, górne włazy i tylne drzwi do lądowania. Ze względu na dużą wysokość podwozia obok drzwi znajdowała się składana drabina. W podłodze znajdowały się włazy umożliwiające dostęp do jednostek transmisyjnych. W kabinie pasażerskiej umieszczono trzy pojedyncze fotele. Kolejne sześć siedzeń miało podwójną konstrukcję i można je było przeznaczyć na montaż noszy. Zainstalowano trzy szafki do przewożenia różnego mienia, stół z szufladą itp. Załoga miała do dyspozycji umywalkę, gaśnice, aparaty do sztucznego oddychania, zestawy do zakraplania, różne lekarstwa i inny sprzęt.
Zaproponowano wyposażenie kabiny pasażerskiej w środki wentylacji i ogrzewania. Ogrzewanie zapewniała autonomiczna grzałka zasilana benzyną. Do jego działania konieczne było zapewnienie dodatkowego zbiornika paliwa o pojemności 110 litrów. W razie potrzeby zbiornik ten został podłączony do układu paliwowego pojazdu, co zwiększyło zasięg do 700 km.
Po niezbędnych testach przyjęto do zaopatrzenia jednostkę poszukiwawczo-ewakuacyjną PEU-1M. Odpowiednie zamówienie pojawiło się w 1974 roku. W ciągu następnych kilku lat zakład rozwojowy zbudował i przekazał Siłom Powietrznym sześć takich maszyn. Wiadomo, że wkrótce po pojawieniu się nowej maszyny specjalnej, sprzęt rodziny PES-1 otrzymał nieoficjalne przezwiska. Podstawowy pojazd terenowy nosił przydomek „Żuraw”, a modyfikacja pasażerska została oznaczona jako „Salon”.
Pojazd zjazdowy typu Yantar-2, który miał być przewożony na pojazdach PES-1B. Fot. Wikimedia Commons
Praktyka dość szybko pokazała pełny potencjał zaktualizowanego kompleksu poszukiwawczo-ratowniczego. Pracując razem, PES-1 i PES-1M wykazały znakomite wyniki. Dwa samochody mogłyby szybko rozwiązać problem odnalezienia lądujących astronautów i przystąpić do ich ewakuacji. „Salon” mógł zabrać na pokład astronautów i nie czekając na zakończenie prac z pojazdem zniżającym, wrócić z powrotem. Jednocześnie, w przeciwieństwie do podstawowego „Żurawia”, przewoził astronautów w komfortowych warunkach.
W 1974 roku powstał nowy model technologii, który pojawił się dzięki postępowi w dziedzinie statków kosmicznych. Do eksploatacji przygotowywano nowe satelity rozpoznawcze projektu Yantar. Ich pojazd zjazdowy, który dostarczał na Ziemię filmy z obrazami danych terytoriów, różnił się od istniejących produktów swego rodzaju dużymi rozmiarami. Istniejące maszyny PES-1 nie mogły być używane z takimi urządzeniami.
Aby rozwiązać ten problem, opracowano maszynę PEU-1B. Różniła się od podstawowej próbki jedynie konstrukcją żurawia i kołyski. Wysięgnik dźwigu został wydłużony do 5,5 m, a podpora pojazdu zjazdowego została przeprojektowana zgodnie z wymaganiami nowego udźwigu. Eksploatację takiego sprzętu rozpoczęto w 1977 roku. Satelity serii Yantar miały być budowane w dużych seriach i często startowane, ale siły powietrzne zamówiły do współpracy tylko trzy pojazdy terenowe.
Produkcja seryjna maszyn specjalnych rodziny PES-1 trwała do 1979 roku. W tym czasie zbudowano tylko 22 pojazdy terenowe z różnym wyposażeniem. Najbardziej masywną wersją był podstawowy „Żuraw” - 13 jednostek. Liczba "Salonów" była prawie o połowę mniejsza - tylko 6 sztuk. Trzy PES-1B z wysuniętym wysięgnikiem dźwigu opuściły halę montażową jako ostatnie.

PES-1 w muzeum pod Moskwą. Fot. Państwowe Wojskowe Muzeum Techniki / gvtm.ru
Aktywna eksploatacja sprzętu rodziny PES-1 trwała do pierwszej połowy lat osiemdziesiątych. W tym okresie SKB Plant im. Lichaczow opracował i wprowadził do masowej produkcji nowe modele specjalnych maszyn do startów w kosmos. Maszyny te wchodziły w skład kompleksu poszukiwawczo-ewakuacyjnego PEK-490. Później nadano im powszechny przydomek „Niebieski Ptak”. Ponadto opracowano inne projekty, zarówno z rezerwą do zastosowań praktycznych, jak i eksperymentalnym. Na przykład prototyp PES-1R różnił się od maszyn podstawowych obecnością dodatkowej elektrowni odrzutowej, zaprojektowanej w celu zwiększenia zdolności przełajowych.
Instalacje poszukiwawczo-ewakuacyjne rodziny PES-1 nie były masywne, a poza tym dość dawno zostały wycofane z eksploatacji. W ciągu ostatnich dziesięcioleci prawie wszystkie takie maszyny zostały zutylizowane. Na szczęście kilka najciekawszych pojazdów terenowych uniknęło tego losu. Tak więc w Państwowym Wojskowym Muzeum Technicznym (wieś Iwanowskie, obwód moskiewski) znajduje się odrestaurowany model maszyny PES-1 typu „Żuraw”. Ten wyjątkowy eksponat jest pokazywany wraz z innymi ciekawymi opracowaniami SKB ZIL.
Rozwój załogowej astronautyki doprowadził do powstania nowych wymagań dla systemów naziemnych. Wśród innych próbek z branży potrzebne były specjalne pojazdy, które mogłyby znaleźć i zabrać astronautów i ich pojazd do lądowania z odległego obszaru. Już w połowie lat sześćdziesiątych problem ten został pomyślnie rozwiązany. Kompleks PES-1 stał się pierwszym tego typu przykładem w naszym kraju. Następnie na podstawie jego pomysłów i rozwiązań powstały nowe próbki o podobnym przeznaczeniu, które wciąż zapewniają szybki i bezpieczny powrót astronautów do domu.
Według materiałów:
http://gvtm.ru/
http://os1.ru/
http://denisovets.ru/
http://русская-сила.рф/
http://novosti-kosmonavtiki.ru/
Daniłow R.G. Maszyna dla astronautów // Sprzęt i broń, 2010. Nr 8.
informacja