Krajowe bezzałogowe statki powietrzne (część 3)

W pierwszej połowie lat 80. Biuro Konstrukcyjne Tupolewa rozpoczęło prace nad nowym wielozadaniowym pojazdem bezzałogowym, który oprócz wykonywania misji rozpoznawczych mógł uderzać w cele naziemne. Zgodnie ze schematem aerodynamicznym nowy UAV powtórzył dobrze opanowane Tu-141 i Tu-143. Ale w porównaniu z pojazdami rozpoznawczymi poprzedniej generacji był to produkt cięższy, wyposażony w różnorodne urządzenia pokładowe - systemy radarowe i optoelektroniczne zainstalowane na dziobie. Maksymalna prędkość urządzenia to 950 km/h. Zasięg lotu - 300 km. Tu-300 UAV jest wyposażony w bezdopalający silnik turboodrzutowy. Start odbywa się za pomocą dwóch dopalaczy na paliwo stałe. Do startu miał użyć zmodyfikowanej wyrzutni kompleksu VR-2 Strizh. Lądowanie odbywa się za pomocą systemu spadochronowo-odrzutowego.

Tu-300
Prototyp Tu-300 Korshun-U UAV, zaprojektowany w ramach tworzenia kompleksu rozpoznania operacyjno-taktycznego Stroy-F na froncie, odbył swój pierwszy lot w 1991 roku. Maksymalna masa startowa warkot może osiągnąć 4000 kg (dla retroslyatora -3000 kg). Urządzenie zostało po raz pierwszy zademonstrowane na wystawie Mosaeroshow-93. Oprócz wersji uderzeniowej zapowiedziano opracowanie UAV Filin-1 - z wyposażeniem wywiadu elektronicznego i repetierem lotniczym Filin-2. Według przedstawionych materiałów reklamowych „Filin-2” miał przekazywać sygnały radiowe, lecąc na wysokości 3000-4000 m przez 120 minut.

Modyfikacja amortyzatora ma wewnętrzny przedział ładunkowy i jednostkę zawieszenia w dolnej części kadłuba, gdzie różne lotnictwo środki niszczenia lub pojemniki z kamerami, sprzętem na podczerwień i radarami bocznymi, o łącznej wadze do 1000 kg. Mobilne punkty do zdalnego sterowania pojazdami, punkt przetwarzania i dekodowania danych wywiadowczych są wykonane na bazie ciężarówki wojskowej ZIL-131. Jednak z powodu trudności finansowych w połowie lat 90. prace na Tu-300 zostały zamrożone. W 2007 roku firma Tupolew ogłosiła, że osiągnięcia zdobyte podczas tworzenia UAV Tu-300 zostaną wykorzystane do stworzenia nowej generacji ciężkiego drona rozpoznawczego i uderzeniowego.
Wraz ze średnimi i ciężkimi bezzałogowymi statkami powietrznymi w latach 80. ubiegłego wieku w ZSRR w ramach tworzenia zdalnie sterowanego kompleksu rozpoznania powietrznego Stroy-P drony klasa lekka, przeznaczona do prowadzenia rozpoznania wizualnego w czasie rzeczywistym i korygowania ognia artyleryjskiego. W dużej mierze motywacją do opracowania radzieckich mini-UAV były udane doświadczenia Izraelczyków z użyciem takich dronów na początku lat 80. podczas kampanii wojskowej w Libanie. Jednak w trakcie prac nad stworzeniem wydajnego aparatu o niewielkich rozmiarach twórcy napotkali liczne trudności. W przypadku drona o bardzo gęstym układzie, w którym liczył się każdy gram wagi, wymiary i pobór mocy podzespołów elektronicznych odegrały ogromną rolę. Wiele komponentów elektronicznych wyprodukowanych przez przemysł radziecki było gorszych od zachodnich odpowiedników pod względem wydajności, wagi i wymiarów. Jednocześnie trzeba było stworzyć od podstaw szereg ważnych podzespołów drona niewielkich rozmiarów.
Pierwszy lot prototypowego RPV „Bumblebee”, stworzonego w OKB. JAK. Jakowlew odbył się w 1983 roku. Urządzenie zostało wyposażone w silnik tłokowy P-020 o mocy 20 KM. Z 25 startów 20 uznano za udane. Do rozpoznania terenu miała wykorzystać kamerę telewizyjną i kanał transmisji sygnału telewizyjnego. W 1985 roku rozpoczęto opracowywanie ulepszonego RPV Bumblebee-1 z czterokołowym podwoziem. Testy w locie drona z wymiennym zestawem sprzętu telewizyjnego lub IR rozpoczęły się w kwietniu 1986 roku. Urządzenie było przechowywane i transportowane w zamkniętym, złożonym pojemniku z włókna szklanego. Do uruchomienia miał wykorzystać instalację mobilną stworzoną na bazie BTR-D. Lądowanie odbywało się za pomocą spadochronu z amortyzującą nadmuchiwaną torbą, która zmniejsza uderzenia o powierzchnię ziemi. Podczas testów i udoskonaleń do września 1989 r. wykonano 68 lotów, z których 52 zakończyły się sukcesem.

Ale najwyraźniej wyniki testów nie były zbyt zachęcające, ponieważ na podstawie Bumblebee-1 RPV postanowiono stworzyć aparat Pchela-1T z dwusuwowym silnikiem tłokowym P-032. Silnik obraca śmigło popychające o stałym skoku umieszczone w pierścieniowym ogonie. Silniki tłokowe P-032 były produkowane do 1991 roku w SNTK im. N.D. Kuzniecowa. W sumie zbudowano nieco ponad 150 egzemplarzy.
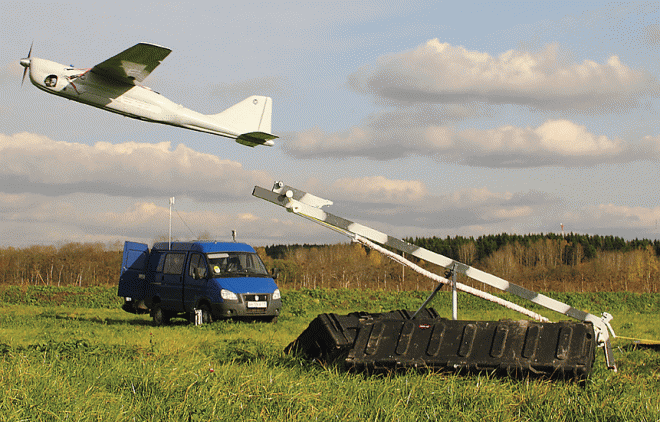
Wystrzelenie RPV Pchela-1T przeprowadzono przy użyciu dopalaczy na paliwo stałe z mobilnej wyrzutni opartej na ziemnowodnym transporterze opancerzonym BTR-D. W skład kompleksu wchodzi naziemna stacja zdalnego sterowania oparta na GAZ-66 oraz dwa wozy wsparcia technicznego. Jeden punkt kontrolny mógł jednocześnie sterować dwoma urządzeniami. Oprócz modyfikacji rozpoznawczej zaplanowano stworzenie zakłócacza tłumiącego działanie radiostacji VHF w promieniu 10-20 km.

„Pchela-1T”
Pierwsze loty zdalnie sterowanego lekkiego pojazdu Pchela-1T rozpoczęły się w 1990 roku i były bardzo trudne ze względu na niestabilność aparatury sterowniczej. W testach dron ważący 138 kg, o rozpiętości skrzydeł 3,3 mi długości 2,8 m był w stanie osiągnąć maksymalną prędkość 180 km/h, prędkość przelotową na trasie – 120 km/h. Maksymalna wysokość lotu to do 2500 m. Optymalny zasięg rozpoznawczy to 100-1000 m. Urządzenie mogło pozostawać w powietrzu przez 2 godziny. Zasób operacyjny to 5 lotów bojowych. Okres gwarancji - 7,5 roku.
Próby bojowe bezzałogowego kompleksu rozpoznawczego z RPV Pchela-1T odbyły się w 1995 roku na Kaukazie Północnym. W sumie w testach wzięło udział 5 pojazdów, które wykonały 10 lotów bojowych, w tym 8 bojowych. Czas spędzony w powietrzu wynosił 7 godzin 25 minut. Maksymalna odległość drona od naziemnej stacji kontroli wyniosła 55 km, wysokość lotu: 600 - 2200 m. Podczas prób bojowych zgubiono dwa urządzenia. Niektóre źródła podają, że zostały zestrzelone przez bojowników podczas misji, inne twierdzą, że drony rozbiły się podczas startu z powodu awarii silnika.

Podczas testów w warunkach bojowych ujawniono pewne niedociągnięcia. Silnik P-032 okazał się dość kapryśny w użytkowaniu w terenie, co było szczególnie widoczne podczas wielokrotnych startów. Ponadto dwusuwowy silnik bez tłumika znacznie zdemaskował zdalnie sterowany pojazd lecący na małej wysokości, w wyniku czego drony na trasie były wielokrotnie ostrzeliwane przez bojowników z broni strzeleckiej. broń. Obraz uzyskany z niestabilizowanej kamery o polu widzenia w skoku - 5° - -65 °, ze względu na drgania przenoszone przez silnik na korpus aparatu, bardzo drżał i trudno było dostrzec małe przedmioty na tło ziemi. Czarno-biały obraz w większości przypadków, ze względu na niską światłoczułość aparatu, okazał się kiepskiej jakości. W rezultacie wojsko oceniło możliwości bezzałogowego kompleksu rozpoznawczego Stroy-P jako niskie. Jednak po pewnych udoskonaleniach i wielokrotnych testach terenowych w 1997 roku kompleks został oddany do użytku. Na podstawie RPV zaplanowano również opracowanie rozpoznania sytuacji radiacyjnej i celu bezzałogowego. W 2001 roku przeprowadzono próby państwowe modyfikacji Pchela-1IK. Na pokładzie drona przetestowano kamerę IR, która zapewnia rozpoznanie i obserwację terenu w nocy i przy słabym oświetleniu.
Na początku XXI wieku trwały prace nad stworzeniem bardziej zaawansowanych bezzałogowych systemów rozpoznawczych „Stroy-PL” i „Stroy-PD”, o ulepszonych osiągach operacyjnych i w locie oraz większych możliwościach RPV. Według informacji opublikowanych w rosyjskich mediach, w 2000 roku pomyślnie zakończono testy bezzałogowego kompleksu rozpoznania lotniczego Stroj-PD ze zmodernizowanymi bezzałogowymi statkami powietrznymi Pchela-2010TV i Pchela-1K.
Transport i wyrzutnia TPU-576 z kompleksu "Stroy-PD" z RPV Pchela-1K
W ramach kompleksu Stroy-PD wyrzutnia TPU-1 podwozia Ural-576 i naziemna stacja kontroli oparta na Ural-532362 zostaną wykorzystane do uruchomienia, konserwacji i tankowania RPV Pchela-375K.

W 2005 roku pojawiły się informacje, że w ramach państwowego zamówienia obronnego Smoleńskie Zakłady Lotnicze rozpoczęły masową produkcję RPV Pchela-1K. Według stanu na jeden zestaw sprzętu naziemnego kompleksu Stroy-PD powinno przypadać 12 pojazdów bezzałogowych. Według The Military Balance 2016 armia rosyjska miała niewielką liczbę kompleksów Stroy-PD z dronami Pchela-1K. Według informacji opublikowanych w źródłach zachodnich, w 1994 roku do KRLD sprzedano partię dziesięciu RPV "Pchela" wraz z zestawem sprzętu naziemnego.
Jeśli w latach 60-80 radzieckie bezzałogowe statki powietrzne klasy średniej i ciężkiej jako całość odpowiadały światowemu poziomowi, to po rozpadzie ZSRR nasz kraj pozostawał daleko w tyle za innymi zaawansowanymi technologicznie krajami w tej dziedzinie budowy samolotów . Powodów było wiele. W obliczu braku funduszy, niezrozumienia priorytetów i trwającej „reformy” sił zbrojnych, bezzałogowy kierunek był na uboczu. Ponadto znaczna część generałów, myśląc w kategoriach wczorajszych realiów, uważała kompaktowe drony za drogie zabawki, nie nadające się do wykorzystania w rzeczywistych operacjach bojowych. W rzeczywistości możliwości RPV są dość duże. Na przykład, oglądając obraz nadawany z bezzałogowego pojazdu, można skutecznie kontrolować ogień artylerii dalekiego zasięgu, od razu dokonywać korekt, kontrolować komunikację wroga i wyznaczać cel swojemu samolotowi. Pod wieloma względami RPV są w stanie zastąpić działania grup rozpoznania naziemnego, zwiększyć szybkość pozyskiwania i wiarygodność informacji, co jest niezbędne we współczesnej walce do podejmowania terminowych decyzji. Jednak oprócz banalnego braku pieniędzy i inercji najwyższego kierownictwa wojskowego, z powodu utraty szeregu kluczowych technologii i zniszczenia współpracy przemysłowej, przeniesienia strategicznych przedsiębiorstw w ręce prywatne i zakończenia wielu obiecujących programów badawczych, tworzenie naprawdę skutecznych UAV w naszym kraju stało się bardzo problematyczne.
Należy rozumieć, że do stworzenia nowoczesnego drona wojskowego niezbędne jest:
1. Doskonała baza elementowa do tworzenia bardzo lekkich, kompaktowych elementów awioniki i wysokowydajnych systemów obliczeniowych.
2. Ekonomiczne małe silniki lotnicze przeznaczone do montażu na małych samolotach, które charakteryzują się również znaczną żywotnością i wysoką niezawodnością.
3. Lekkie i trwałe materiały kompozytowe.
Jak wiadomo, Związek Sowiecki nie był liderem we wszystkich tych dziedzinach w momencie swojego upadku. A w „nowej Rosji” obszary te rozwijały się według zasady rezydualnej. Ponadto, jeśli bezzałogowy statek powietrzny klasy lekkiej może być sterowany zdalnie za pomocą kanału radiowego, to dla UAV klasy średniej i ciężkiej konieczne jest:
1. Konstelacja satelitarna systemów łączności i sterowania w czasie rzeczywistym.
2. Naziemne mobilne punkty kontroli wyposażone w nowoczesny sprzęt łączności i zautomatyzowane stanowiska pracy oparte na PVEM.
3. Algorytmy przesyłania i sterowania danymi, w tym zapewniające realizację elementów „sztucznej inteligencji”.
Poważne opóźnienie w tych obszarach doprowadziło do tego, że w naszym kraju wciąż nie ma seryjnych dronów rozpoznawczych i uderzeniowych, które mogłyby się równać z UAV MQ-1 Predator, którego eksploatację rozpoczęto w 1995 roku. Około 10 lat temu nasza armia zdała sobie z tego sprawę, ale nie dało się szybko nadrobić dwudziesięcioletniego opóźnienia, nawet przy przeznaczeniu na to znacznych środków finansowych. Tak więc, zgodnie z oświadczeniem złożonym w kwietniu 2010 r. przez wiceministra obrony V.A. Popowkin, rosyjskie Ministerstwo Obrony, bezskutecznie wydało pięć miliardów rubli na rozwój i testowanie krajowych bezzałogowych statków powietrznych. W związku z tym, wraz z rozwojem własnych projektów, rozpoczęły się zakupy UAV za granicą. W ostatnich latach w Rosji opracowano znaczną liczbę bezzałogowych pojazdów klasy lekkiej. Aby nie przeciążać przeglądu niepotrzebnymi informacjami, rozważymy tylko próbki przyjęte przez rosyjskie organy ścigania, a także niektóre obiecujące modele.
W 2005 roku firma ENIKS (Kazań) rozpoczęła na małą skalę montaż urządzeń Eleron-3SV używanych w mobilnym ubieralnym kompleksie rozpoznawczym. Urządzenie zbudowane według schematu „latające skrzydło”, z silnikiem elektrycznym, ma masę startową 4,5 kg i jest uruchamiane za pomocą gumowego amortyzatora lub urządzenia rozruchowego typu belkowego z wiatrówką. Urządzenie jest w stanie utrzymać się w powietrzu do 2 godzin i latać z prędkością 70-130 km/h w zakresie wysokości 50-4000 m.

„Eleron-3SV” przy wyrzutni
RPV typu Eleron-3SV jest przeznaczony do prowadzenia rozpoznania krótkiego zasięgu na odległość do 25 km, w interesie jednostek wojskowych pierwszego rzutu i działających w oderwaniu od sił głównych. Jako ładunek można zastosować kamery telewizyjne, termowizyjne i fotograficzne, oznacznik laserowy, sondę meteorologiczną, nadajnik zakłóceń radiowych VHF. Masa ładunku - do 800 g. Według informacji podanych na stronie internetowej producenta od 2005 roku do armii rosyjskiej, Ministerstwa Spraw Wewnętrznych i Federalnej Służby Bezpieczeństwa Federacji Rosyjskiej dostarczono ponad 110 RPV.
Jesienią 2008 roku Dozor-4 RPV przeszedł testy terenowe na posterunku granicznym w Dagestanie. Kompleks Dozor jest umieszczony na podwoziu pojazdu terenowego. W skład kompleksu wchodzi mobilna naziemna stacja kontroli oraz pojazd, w którym transportowany jest samolot w specjalnym kontenerze w stanie częściowo rozłożonym, a także paliwo i smary oraz części zamienne. Czas rozmieszczenia i przygotowania kompleksu do lotu to nie więcej niż 45 minut. Start i lądowanie odbywa się za pomocą podwozia kołowego na terenach nieutwardzonych.

Naziemna stacja kontroli oparta na Land Rover Defender
Bezzałogowy pojazd Dozor-4 jest zbudowany zgodnie z normalnym schematem aerodynamicznym z dwubelkowym kadłubem i śmigłem pchającym. Posiada dwukilowe pionowe usterzenie z poziomym stabilizatorem. Montaż skrzydła i ogona - zmontowany i zainstalowany bezpośrednio przed odlotem. Plastikowe śmigło napędza dwusuwowy silnik spalinowy 3W 170TS produkcji niemieckiej. Moc dwucylindrowego silnika wynosi 12 KM. Masa silnika - 4,17 kg.

"Dozor-4"
Urządzenie o rozpiętości skrzydeł 4,6 m i długości 2,6 m ma masę startową 85 kg. Podobno Dozor-4 jest w stanie osiągnąć prędkość do 150 km/h i utrzymać się w powietrzu przez 8 godzin. Maksymalna wysokość lotu to 4000 m. Maksymalna masa ładunku to 10 kg. Do przeprowadzenia rekonesansu na trasie lotu wykorzystywana jest kamera telewizyjna o rozdzielczości 752 x 582 piksele, 12-megapikselowy aparat cyfrowy oraz kamera termowizyjna.
W zasięgu wzroku Dozor-4 sterowany jest za pomocą poleceń ze stacji naziemnej z jednoczesną transmisją obrazu z drona do punktu kontrolnego. W przypadku utraty przez operatora eskorty, autonomiczny system sterowania uruchamia się wraz z lotem po określonej trasie. Nawigacja UAV oparta jest na poleceniach małogabarytowego systemu nawigacji inercyjnej oraz sygnałach odbiornika GLONASS/GPS. Łącznie na trasie może znajdować się aż 250 punktów kontrolnych. W segmencie lotu autonomicznego informacje są zapisywane na pokładowym urządzeniu pamięci masowej.
W 2008 roku kompleks wielofunkcyjny Tipchak, utworzony w Biurze Projektowym Łucz Rybinsk, został doprowadzony do stanu odpowiedniego do przyjęcia.

Kompleks rozpoznawczy UAV BLA-05 „Tipchak” na wyrzutni
UAV BLA-05 o masie startowej 60 kg jest zdolny do prowadzenia rozpoznania w promieniu 40-60 km od naziemnego punktu kontrolnego, w zakresie prędkości lotu 90-180 km/h i na wysokości 200- 3000 m. Czas lotu - 2 h. Urządzenie o długości 2,4 m ma rozpiętość skrzydeł 3,4 m i jest w stanie unieść ładunek o masie 14,5 kg. RPV jest uruchamiany za pomocą wzmacniacza na paliwo stałe, a lądowanie odbywa się na spadochronie.

BLA-07
Oprócz BLA-05 RPV, w ramach kompleksu opracowano BLA-07 o masie startowej do 35 kg i zasięgu rozpoznawczym do 50 km. Ładowność - 10 kg. Na wyposażeniu pojazdów BLA-05 znajdują się kamery TV/IR oraz kamera cyfrowa wysokiej rozdzielczości. Ładunek może również obejmować: sprzęt do przekazywania sygnałów radiowych, zagłuszania i wywiadu radiacyjno-chemicznego i elektronicznego.

Naziemny punkt kontrolny kompleksu „Tipchak”.
Oprócz zdalnie sterowanych pojazdów w skład kompleksu wchodzi pojazd transportowy i startowy, pojazd wsparcia technicznego, mobilna stacja kontroli z wysuwanym słupem antenowym i do 6 RPV.

Stanowiska pracy operatorów bezzałogowego kompleksu „Tipchak”
Produkcja seryjna elementów kompleksu bezzałogowego „Tipchak” na zlecenie Ministerstwa Obrony Federacji Rosyjskiej została przeprowadzona w przedsiębiorstwach koncernu „Vega”. Zgodnie z przeznaczeniem „Tipchak” jest podobny do bezzałogowego kompleksu rozpoznawczego „Stroy-PD”, ale ma lepsze możliwości.
W 2009 roku zdalnie sterowany pojazd ZALA 421-04M, opracowany przez Zala Aero Unmanned Systems, wszedł do służby w szeregu rosyjskich organów ścigania. Dron o wadze 5,5 kg wyposażony jest w kolorową kamerę wideo stabilizowaną w dwóch płaszczyznach z podglądem dowolnego punktu dolnej półkuli, z płynną zmianą kąta pola widzenia lub kamerę termowizyjną na platformie stabilizowanej żyroskopowo . ZALA 421-04M to mini-RPV zbudowany według schematu „latające skrzydło” ze śmigłem ciągnika, obracanym silnikiem elektrycznym zasilanym z akumulatorów. Dzięki zastosowaniu napędu elektrycznego urządzenie nie demaskuje się dźwiękiem silnika.

Uruchomienie RPV ZALA 421-04M
Uruchomienie urządzenia odbywa się ręcznie za pomocą elastycznej katapulty i nie wymaga specjalnie wyposażonego pasa startowego oraz nieporęcznego sprzętu. Zejście po wykonaniu zadania odbywa się za pomocą spadochronu. Odbieranie informacji z drona i wydawanie mu poleceń odbywa się poprzez jednostkę sterującą zaimplementowaną w oparciu o specjalny laptop sprzężony z kompaktową przenośną stacją telekontroli. Podczas lotu drona komendy i wymiana informacji odbywa się poprzez obrotową antenę kierunkową zamontowaną na statywie.
Niemal równocześnie z ZALA 421-04M RPV organy ścigania zaczęły kupować aparat podobnej klasy, Irkut-10. Zgodnie z broszurami przedstawionymi przez korporację Irkut, urządzenie o maksymalnej masie startowej 8,5 kg wyposażone jest w silnik elektryczny ze śmigłem pchającym. Podczas tworzenia UAV zbudowanego według schematu „latającego skrzydła” szeroko stosowane są materiały kompozytowe, które zapewniają wysoką wytrzymałość przy stosunkowo niewielkiej masie. W razie potrzeby możliwy jest szybki montaż i demontaż bez użycia specjalnych środków technicznych, co ułatwia konserwację i naprawę w terenie.

„Irkut-10”
Kompleks składa się z dwóch RPV, urządzeń do obsługi naziemnej i sterowania. Wystrzelenie UAV odbywa się z przenośnej katapulty, lądowanie odbywa się za pomocą spadochronu na niewyposażonych terenach nieutwardzonych.
Równolegle z tworzeniem krajowych lekkich pojazdów bezzałogowych zakupiono drony produkcji zagranicznej. Po zapoznaniu się z izraelskim mini-RPV IAI Bird Eye 400 postanowiono zorganizować jego licencjonowany montaż w Uralskim Zakładzie Lotnictwa Cywilnego SA w Jekaterynburgu. Wersja rosyjska otrzymała oznaczenie „Zastava”. W 2011 roku Ministerstwo Obrony Rosji podpisało z UZGA kontrakt na dostawę w latach 2011-2013 27 systemów z mini-RPV typu Zastava o łącznej wartości 1,3392 mld rubli.

Przygotowanie RPV "Zastava" do startu
Zgodnie z tą umową strona izraelska przekazała niezbędną dokumentację techniczną, urządzenia technologiczne, stanowiska testowe i kompleksy szkoleniowe. Israel Aerospace Industries Ltd dostarcza również komponenty i zespoły oraz zapewnia szkolenia dla personelu technicznego UZGA. Technologia produkcji UAV jest zgodna z wymaganiami rosyjskich dokumentów regulacyjnych i technologicznych.
Elementy kompleksu mini-RPV Zastava w kontenerze transportowym
Bezzałogowy pojazd IAI Bird Eye 400 (Bird Eye - Bird's Eye) został stworzony przez izraelską firmę IAI w 2003 roku. Cały bezzałogowy kompleks rozpoznawczy umieszczony jest w dwóch kontenerowych plecakach i może być skutecznie wykorzystywany przez siły specjalne. Pierwsze RPV Zastava zostały przetestowane w grudniu 2012 roku.

Lekki pojazd o masie 5,5 kg, długości 0,8 m i rozpiętości skrzydeł 2,2 m przewozi ładunek o masie 1,2 kg. Miniaturowy silnik elektryczny zapewnia Bird Eye 400 czas lotu około godziny, zasięg 10 km i wysokość lotu około 3000 m. Maksymalna prędkość lotu to 85 km/h.
Pomimo niewielkiej ładowności mini-RPV jest wyposażony w bardzo skuteczny system rozpoznania i nadzoru Micro POP, który jest zbudowany na zasadzie „otwartej architektury” i pozwala w ciągu kilku minut zastąpić kamerę telewizji dziennej kamerą termowizyjną .

Pilot RPV "Zastava"
Struktura „dwupaku”, obsługiwanego przez dwuosobową załogę, obejmuje trzy RPV, przenośny pulpit sterowniczy, zestaw docelowego sprzętu optoelektronicznego, kompleks łączności, zasilacze i zestaw naprawczy. Start RPV, tradycyjnie dla pojazdów o takiej masie i gabarytach, odbywa się za pomocą gumowego amortyzatora, a lądowanie na spadochronie.

Najwyraźniej bezzałogowy kompleks rozpoznawczy z rpv "Zastawa" był używany w południowo-wschodniej ukrainie. Według oświadczeń ukraińskich sił zbrojnych w latach 2014-2015 w strefie konfliktu zbrojnego zestrzelono dwa drony.
W ramach prac badawczo-rozwojowych Navodchik-2, Izhmash LLC - Systemy bezzałogowe, do 2010 roku powstała rodzina UAV Granat. W sumie przetestowano cztery typy pojazdów bezzałogowych, różniące się składem ładowności i zasięgiem bojowego użycia: 10, 15, 25 i 100 kilometrów. Według dostępnych informacji, BSP Granat-2012 został wprowadzony do produkcji seryjnej w 2 roku jako pierwszy z tej rodziny.

Przygotowania do wystrzelenia UAV Granat-2
Ważące 4 kg urządzenie wyposażone jest w silnik elektryczny i ma dość kompaktowe wymiary. Przy długości 1 metra 80 centymetrów rozpiętość skrzydeł tego samolotu wynosi 2 metry. Stosunkowo małe wymiary pozwalają na uruchomienie drona za pomocą rąk, bez użycia specjalnych urządzeń startowych. Lądowanie odbywa się ze spadochronem. Maksymalna prędkość lotu to 85 km/h, przelotowa – 70 km/h. Czas trwania rozpoznania 1 h. Maksymalna wysokość lotu 3000 m. Wysokość operacyjna 100-600 m. Na wyposażeniu pokładowym znajduje się sprzęt foto, video i termowizyjny. W skład kompleksu wchodzą dwa RPV, naziemna stacja kontroli, części zamienne do dronów i sprzęt naziemny. Kalkulacja - 2 osoby.
Ze względu na niski koszt, bezpretensjonalność i łatwość obsługi, Granat-2 RPV jest bardzo popularny w rosyjskich siłach zbrojnych i jest obecnie regularnym środkiem rozpoznania artyleryjskiego, dostosowania ognia artyleryjskiego i MLRS. Drony typu „Granat-2” dobrze sprawdziły się w walkach na południowym wschodzie Ukrainy i Syrii.
Bezzałogowe statki powietrzne „Granat-4” przeznaczone są do rozpoznania i korygowania ognia artyleryjskiego oraz wieloprowadnicowych systemów rakietowych na odległość do 100 km (pod warunkiem, że znajdują się w strefie widzialności radiowej). Aby zapewnić komunikację z RPV w dużej odległości od naziemnego punktu kontrolnego, w sterowni na podstawie pojazdu KamAZ-43114 znajduje się wysuwany maszt antenowy. W skład kompleksu Granat-4 wchodzą: dwa RPV, dwa zestawy wymiennych modułów ładunku (TV/IR/EW/foto), zestaw kontroli naziemnej. Oprócz rozpoznania wizualnego i korygowania działań systemów artyleryjskich, istnieje zestaw sprzętu radiowego, który pozwala na dokładne namierzenie kierunku sygnału radiowego wysokiej częstotliwości.

Przygotowania do startu RPV „Granat-4”
Zdalnie sterowany pojazd o wadze 30 kg jest wyposażony w silnik spalinowy ze śmigłem pchającym i może przenosić ładowność do 3 kg. Dron o rozpiętości skrzydeł 3,2 m jest w stanie unosić się w powietrzu przez 6 godzin. Wysokość robocza patrolu - 300-2000 m. Sufit - 4000 m. Prędkość maksymalna -140 km/h. Prędkość patrolowa – 90 km/h. Wystrzelenie aparatu odbywa się z katapulty. Powrót - spadochronem. Przygotowanie drona do startu zajmuje 15 minut.
Według stanu na 2014 r. armia rosyjska miała około trzech tuzinów kompleksów z dronami Granat-4. Uczestniczyli w operacjach wojskowych w Syryjskiej Republice Arabskiej i południowo-wschodniej Ukrainie, wykazując się prostotą i niezawodnością w działaniu, wykazując się zdolnością do wykonywania szerokiego zakresu zadań. Nowoczesny sprzęt zainstalowany na Granacie-4 RPV umożliwia prowadzenie wizyjnego i elektronicznego rozpoznania w dzień iw nocy.
W 2012 roku rozpoczęły się testy wojskowe bezzałogowego samolotu rozpoznawczego Tachyon firmy Izhmash – Unmanned Systems LLC. UAV jest zbudowany zgodnie z konfiguracją aerodynamiczną „latającego skrzydła”. Przy tworzeniu tego drona wzięto pod uwagę doświadczenia z operowania innymi dronami małej klasy w wojsku. Sprzęt Tachyon jest zdolny do pracy w trudnych warunkach meteorologicznych, w zakresie temperatur od -30 do +40°C, przy porywach wiatru do 15 m/s. Urządzenie z silnikiem elektrycznym ma masę startową 25 kg. Długość - 610 mm. Rozpiętość skrzydeł - 2000 mm. Ładowność - 5 kg. Maksymalna prędkość lotu -120 km/h, przelotowa - 65 km/h. Urządzenie jest w stanie utrzymać się w powietrzu przez 2 godziny i prowadzić rozpoznanie w odległości do 40 km od miejsca startu.

RPV „Tachion”
Dostawy seryjnych systemów rozpoznania Tachyon dla wojsk trwają od 2015 roku. Istnieją informacje, że wodorowe ogniwa paliwowe były testowane na tego typu dronach. W tym przypadku jako środek utleniający stosuje się powietrze atmosferyczne. Zastosowanie ogniw paliwowych może znacznie wydłużyć czas lotu.
Obok urządzeń typu Granat-4 bezzałogowce Orlan-10 są dziś najbardziej wojownicze. Ten wielofunkcyjny dron został stworzony przez specjalistów Specjalnego Centrum Technologicznego (STC) w 2010 roku. „Orlan-10” jest częścią systemu kontroli poziomu taktycznego ESU TK (jednolity system kontroli poziomu taktycznego), dzięki czemu może przekazywać informacje o celach do wszystkich wozów bojowych podłączonych do systemu informacji bojowej.

BSP "Orlan-10"
Obecnie Orlan-10 UAV jest prawdopodobnie najbardziej zaawansowanym rosyjskim UAV klasy lekkiej. Przy budowie UAV Orlan-10 zastosowano modułową architekturę, która pozwala na bardzo szybką zmianę składu wyposażenia pokładowego, a także transport UAV w stanie rozłożonym.

Kontener do transportu UAV "Orlan-10"
Szeroka gama wymiennych zestawów użytkowych rozszerza zakres możliwych zadań. Dron ma na pokładzie własną prądnicę, co umożliwia korzystanie z energochłonnego sprzętu: sprzętu walki elektronicznej i wzmacniaków sygnału radiowego. Jako ładunek o wadze do 6 kg można umieścić elementy sprzętu RB-341V „Leer-3”, zaprojektowanego w celu tłumienia komunikacji naziemnej wroga.

Nowa modyfikacja Orlan-10 wyposażona jest w kamery wysokiej rozdzielczości, co pozwala na tworzenie wysokiej jakości map 3D oraz odbiór i emisję obrazu wysokiej rozdzielczości z rejestracją aktualnych parametrów (współrzędne, wysokość, numer klatki). W jednym locie urządzenie jest w stanie przebadać obszar do 500 km². Nawigacja na trasie lotu odbywa się za pomocą pokładowego odbiornika sygnału GLONASS/GPS. Do sterowania dronem z mobilnej stacji naziemnej wykorzystywany jest sprzęt nadawczo-odbiorczy, który tworzy krypto-chroniony kanał dowodzenia i telemetrii. Obrazy wideo i zdjęcia transmitowane z UAV są również szyfrowane.
Z centrum sterowania możliwe jest jednoczesne kontrolowanie działań czterech dronów na odległość do 120 km. Każdy dron może być używany jako pośredni przekaźnik do transmisji sygnałów sterujących i informacji wywiadowczych. Chociaż masa urządzenia jest stosunkowo niewielka (15-18 kg, w zależności od modyfikacji i zestawu wyposażenia pokładowego), posiada dane lotu, które w pełni odpowiadają ilości wykonywanych zadań. Tłokowy silnik benzynowy rozpędza Orlan-10 do 150 km/h. Prędkość marudzenia - 80 km/h. W razie potrzeby Orlan-10 jest w stanie wykonywać autonomiczne naloty rozpoznawcze po zaprogramowanej trasie na odległość do 600 km. Czas lotu bez międzylądowania wynosi do 10 godzin. Praktyczny pułap to 5000 m. Dron wystrzeliwany jest z katapulty, a po powrocie ląduje na spadochronie.

Dostawy pierwszych bezzałogowych statków powietrznych Orlan-10 dla wojsk rozpoczęły się po 2012 roku. Obecnie do armii rosyjskiej dostarczono ponad 200 urządzeń tego typu. Orlani spisywali się dobrze podczas lotów rozpoznawczych w Syrii. Jednocześnie nie tylko prowadzili rozpoznanie i kontrolowali celność nalotów, ale także nadawali oznaczenie celów rosyjskim samolotom bojowym, śmigłowcom i systemom artylerii. Chociaż Orlan-10 nie jest uzbrojony, według zachodnich obserwatorów wojskowych stanowi on skuteczną część kompleksu uderzeniowego. Lekki rosyjski dron może być używany jako system kontroli i regulacji w czasie rzeczywistym ostrzału artyleryjskiego podczas kontrolowania ognia 152-mm dział samobieżnych „Msta-S” i MLRS, otrzymując z UAV współrzędne celów i poprawki za wybuchy pocisków obserwowane przez żyroskopowe kamery telewizyjne i kamery na podczerwień.
Rosyjskim specjalistom udało się w dość krótkim czasie opracować i zorganizować montaż lekkich i ultralekkich zdalnie sterowanych pojazdów przeznaczonych do patrolowania i zbierania informacji wywiadowczych w bliskiej strefie. Dzięki temu w 2014 roku udało się sformować 14 jednostek bezzałogowych statków powietrznych, które uzbrojono w 179 systemów bezzałogowych. Należy jednak zauważyć, że produkcja lekkich RPV nie jest w pełni zlokalizowana w naszym kraju i zawiera dużą część importowanych komponentów: elementy radioelektroniczne, systemy sterowania, lekkie akumulatory elektryczne o dużej pojemności, sprzęt komputerowy i oprogramowanie. Jednocześnie stworzenie bezzałogowych statków powietrznych o zasięgu rozpoznawczym ponad 100 km z transmisją informacji w czasie rzeczywistym okazało się bardzo trudnym zadaniem. Jak wiecie, w okresie „serdiukowizmu” kierownictwo Ministerstwa Obrony RF zmierzało do nabycia zagranicznych modeli sprzętu i broni. I tak, według Rosyjskiego Centrum Analiz Światowego Handlu Bronią (TSAMTO), w kwietniu 2009 roku zakupiono do kompleksowych testów dwa izraelskie drony Searcher Mk II średniej klasy. Transakcja wyniosła 12 milionów dolarów.W momencie sprzedaży był daleki od najnowszego rozwoju izraelskiego, ale w tym czasie w Rosji nie było wykonalnych analogów.
W 2012 roku Uralskie Zakłady Lotnictwa Cywilnego (UZGA) uruchomiły produkcję licencjonowanej kopii BSP IAI Searcher Mk II. - „Forpost”. W 2011 roku Ministerstwo Obrony Federacji Rosyjskiej podpisało kontrakt z UZGA na dostawę 10 systemów z bezzałogowcem Forpost o łącznej wartości 9,006 mld rubli. Każdy kompleks posiada naziemną stację kontroli i trzy UAV.
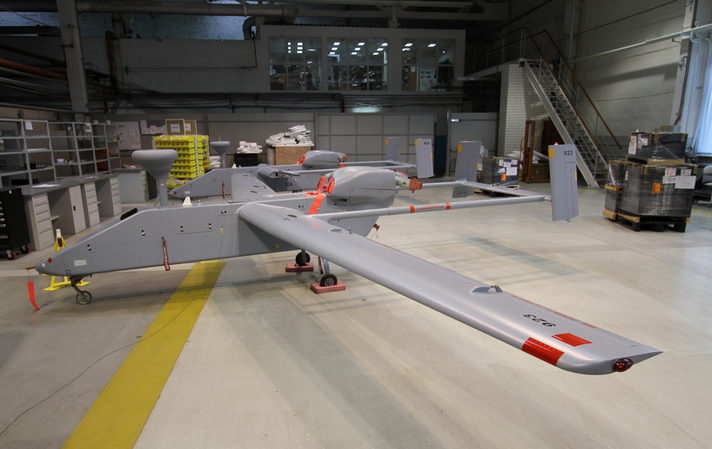
BSP „Forpost” w warsztacie UZGA
Według informacji reklamowych opublikowanych przez izraelski koncern Israel Aerospace Industries, bezzałogowy pojazd modyfikacji Searcher II (angielski Searcher - Seeker), który swój pierwszy lot odbył w 1998 roku, ma masę 436 kg i zasięg 250 km. Searcher II jest wyposażony w silnik tłokowy UEL AR 68-1000 o mocy 83 KM. Z. z trójłopatowym śmigłem pchającym. Urządzenie może znajdować się w powietrzu do 18 godzin. Maksymalna prędkość lotu – 200 km/h, przelotowa – 146 km/h. Sufit praktyczny to 7000 m. Start i lądowanie urządzenia o długości 5,85 m i rozpiętości skrzydeł 8,55 odbywa się na samolocie - na trójkołowym podwoziu. Ponadto start można przeprowadzić z nieprzygotowanych miejsc, używając katapulty lub dopalaczy na paliwo stałe.

Holowana stacja sterująca BSP „Forpost”
W skład kompleksu wchodzi stacja kontroli, pojazdy wsparcia technicznego oraz 3 drony. Według stanu na koniec 2017 roku do wojska dostarczono 30 kompleksów. Podczas wizyty w UZGA wiceministra obrony J. Borysowa w grudniu 2017 roku poinformowano, że w 2019 roku montaż BSP Forpost rozpocznie się w całości od rosyjskich komponentów. Według zagranicznych źródeł bezzałogowe statki powietrzne Forpost stacjonowały w bazie lotniczej Khmeimim podczas operacji wojskowej rosyjskich sił powietrznych w Syrii.
W 2007 roku na pokazach lotniczych MAKS-2007 na ekspozycji RAC MiG SA został zaprezentowany układ samolotu rozpoznawczego i uderzeniowego Skat. Podczas projektowania MiG Skat opracowano rozwiązania mające na celu ograniczenie widoczności radarowej i termicznej.

UAV „Skat”
Urządzenie o maksymalnej masie startowej 10 ton planowano wyposażyć w silnik turbowentylatorowy RD-5000B o ciągu 5040 kgf. Bezzałogowy „stealth” o rozpiętości skrzydeł 11,5 m miał osiągnąć maksymalną prędkość 850 km/h i mieć zasięg bojowy 1500 km. Ładunek bojowy o masie do 6000 kg planowano umieścić w wewnętrznych przedziałach i czterech zewnętrznych uzbrojeniach. Uzbrojenie miało obejmować bomby nastawne o masie 250-500 kg oraz pociski kierowane Kh-31A/P i Kh-59. Jednak z powodu braku funduszy obiecujący projekt został wstrzymany. Następnie rozwój Skata został przeniesiony do Biura Projektowego Suchoj i wykorzystany przy projektowaniu UAV S-70, stworzonego w ramach R&D Okhotnik. Charakterystyka konstrukcyjna tego urządzenia nie jest znana. Według szacunków ekspertów, jego masa może sięgać 20 ton, a maksymalna prędkość szacowana jest na 1000 km/h.
W tej chwili na uzbrojeniu rosyjskich Sił Powietrznych i Kosmicznych nie ma szturmowych bezzałogowych statków powietrznych, co oczywiście nie może zadowolić naszych wojskowych. Od 2011 OKB im. Simonova wraz z grupą Kronstadt, w ramach projektu Altius-M, opracowuje ciężki (masa startowa 5000-7000 kg) BSP Altair, który oprócz monitorowania powierzchni ziemi i wody oraz prowadzenia wywiadu elektronicznego , będzie mógł przenosić klęskę samolotów kierowanych. Opracowanie kompleksu urządzeń pokładowych powierzono EMZ im. VM Miasiszczew. Z budżetu przeznaczono 1 miliard rubli na stworzenie kompleksu bezzałogowego.

Bezzałogowy statek powietrzny „Altair”
W sierpniu 2016 roku pojawiła się informacja, że prototyp bezzałogowego statku powietrznego Altair, zbudowany w KAPO imienia. Gorbunow w Kazaniu wykonał pierwszy lot. Według informacji opublikowanych w otwartych źródłach, Altair może mieć czas lotu do 48 godzin, pokonując w tym czasie odległość do 10 000 km. Dron jest w stanie zabrać na pokład do 2 ton ładunku i wznieść się na wysokość do 12 000 m. Płatowiec urządzenia wykonany jest z materiałów kompozytowych, jego długość to 11,6 m, rozpiętość skrzydeł to 28,5 m.

Zdjęcie satelitarne Google Earth: prototyp BSP "Altair" na lotnisku KAPO im. Gorbunow w Kazaniu
Schemat aerodynamiczny płatowca powtarza jednosilnikowy UAV Orion klasy średniej o zasięgu do 3000 km, ogłoszony przez grupę Kronstadt. Ponadto system zasilania i pokładowe urządzenia sterujące są w dużej mierze zunifikowane z Orionem. Ale w przeciwieństwie do Oriona, Altair ma dwa silniki pod skrzydłem. Jako elektrownia wykorzystywane są dwa silniki wysokoprężne RED A03, które są produkowane w Niemczech. Chłodzony cieczą turbodoładowany samolotowy silnik wysokoprężny ma moc startową 500 KM. i waga ze skrzynią biegów 363 kg.
W skład awioniki ciężkiego drona wchodzą: system informacyjno-sterujący z kanałami satelitarnymi i radiowymi do wymiany informacji, sprzęt interfejsowy z zespołem urządzeń naziemnych, system monitorowania i diagnostyki urządzeń pokładowych, inercyjny system nawigacji satelitarnej, radar pokładowy system. Jako ładunek można użyć różnego optoelektronicznego sprzętu rozpoznawczego, radarów skierowanych na boki, a także bomb kierowanych i kierowanych pocisków rakietowych. W skład kompleksu wchodzą: stacja kontroli, urządzenia do odbioru i nadawania sygnałów, naziemna stacja kontroli automatycznego startu i lądowania oraz dwa bezzałogowe statki powietrzne. Oczekuje się, że główne testy rosyjskiego ciężkiego BSP „Altair” zostaną zakończone w 2020 roku. Jednak, jak pokazują doświadczenia ostatnich lat, dopracowywanie skomplikowanych technicznie projektów o wysokim współczynniku nowości w naszym kraju bywa bardzo opóźnione.
Latem ubiegłego roku na pokazach lotniczych MAKS-2017 grupa Kronsztad zaprezentowała swój BSP Orion, opracowany na zlecenie rosyjskiego Ministerstwa Obrony w ramach ROC Inohodets. „Orion” jest rosyjskim odpowiednikiem UAV MQ-1 Reaper i tak właśnie wygląda. Przetarg na opracowanie Zespołu Bezzałogowych Statków Powietrznych Średniego Zasięgu (UAC SD) „Pacer” ogłoszono 14 października 2011 r. Uczestniczyły w nim również firmy Tupolew i Vega.

Bezzałogowy statek powietrzny „Orion”
Podobnie jak MQ-1 Reaper, rosyjski UAV Orion jest średniopłatem o dużym wydłużeniu, ogonie w kształcie litery V i silniku pchającym zamontowanym z tyłu. Dwułopatowe śmigło AB-115 o średnicy 1,9 metra napędzane jest czterocylindrowym turbodoładowanym silnikiem benzynowym Rotax 914 o mocy 115 KM. W przyszłości planowane jest użycie rosyjskich silników APD-110/120. Po starcie podwozie drona jest usuwane. Zakłada się, że maksymalny czas lotu bezzałogowca Orion o masie startowej około 1200 kg wyniesie co najmniej 24 godziny, a pułap 7500 metrów. Masa ładunku - 200 kg. Prędkość - 120-200 km / h.

W nosie urządzenia znajduje się celowniczy, żyro-stabilizowany układ optyczno-elektroniczny opracowany przez moskiewską firmę NPK SPP na platformie Argos dostarczonej przez DS Optronics, południowoafrykański oddział koncernu Airbus. System optoelektroniczny, składający się z dwóch kamer termowizyjnych o zmiennym polu kątowym, szerokokątnej kamery telewizyjnej i laserowego wskaźnika celu, jest zdolny do wykrywania i śledzenia w trybie automatycznym oraz wyznaczania celów do użycia broni kierowanej. W centralnym przedziale można umieścić wymienne platformy z kamerami cyfrowymi: radar dozorowania, który jest zamykany dużą przezroczystą owiewką radiową, lub pasywną elektroniczną stację wywiadowczą przeznaczoną do zbierania informacji o systemach obrony powietrznej wroga.

Podczas forum „Army-2017”, które odbyło się w sierpniu 2017 r., firmy „OKB Aviaavtomatika” i „VAIS-Technika” po raz pierwszy zademonstrowały bomby kierowane o masie 25-50 kg, testowane na bezzałogowym statku powietrznym Orion. Trzy różne wersje bomb są sterowane laserowo, telewizyjne i satelitarne.
Według informacji opublikowanych w mediach, testy w locie pierwszego prototypu BSP Orion ruszyły wiosną 2016 roku. Wiadomo, że latem i jesienią 2016 roku prototyp urządzenia był testowany na lotnisku LII im. M.M. Gromow w Żukowskim. W porównaniu z innymi bezzałogowymi statkami powietrznymi będącymi na uzbrojeniu armii rosyjskiej, bezzałogowy statek powietrzny Orion jest z pewnością znaczącym krokiem naprzód. Należy jednak rozumieć, że pod względem danych lotu ogólnie odpowiada on UAV MQ-1 Reaper. W grudniu 2016 r. armia amerykańska postanowiła zrezygnować z dalszej eksploatacji przestarzałego Predatora i całkowicie zastąpić jego UAV MQ-9 Reaper silnikiem turbośmigłowym o mocy 910 KM. Ponury Żniwiarz ma maksymalną prędkość lotu ponad 400 km/h, ładowność do 1700 kg i zasięg ponad 5000 km. Tym samym, mimo pewnych sukcesów w rozwoju bezzałogowych statków powietrznych, nasz kraj wciąż pozostaje w roli nadrabiania zaległości.
Według materiałów:
https://militarizm.livejournal.com/51079.html
http://zonwar.ru/news/news_110_Tu-141_Strish.html
http://www.arms-expo.ru/articles/124/81839/
http://aviation21.ru/3582-2/
http://rusvesna.su/news/1406935390
http://nevskii-bastion.ru/tu-243-maks-1999/
https://defendingrussia.ru/enc/bpla/tu143_krylataja_raketarazvedchik-1531/
http://www.arms-expo.ru/049055055056124052052048048.html
https://militarizm.livejournal.com/51079.html
https://vpk.name/library/reys-d.html
http://www.razlib.ru/transport_i_aviacija/aviacija_i_kosmonavtika_2004_01/p3.php
http://todaysmilitary.ru/2016/01/21/vnutri-tajnoj-programmy-bpla-severnoj-korei/
https://www.globalsecurity.org/military/world/russia/aircraft-uav.htm
https://bmpd.livejournal.com/2587680.html http://www.navaldrones.com/Searcher-II.html
https://sdelanounas.ru/blogs/93663/
https://sdelanounas.ru/blogs/100018/
informacja