Systemy nawigacji satelitarnej ZSRR, Rosji i USA. Historia druga
Ważnym bodźcem dla Stanów Zjednoczonych był 4 października 1957 r. – po wystrzeleniu pierwszego sztucznego satelity Ziemi w ZSRR amerykańscy inżynierowie postanowili przystosować przestrzeń kosmiczną do potrzeb nawigacyjnych (z praktycznością charakterystyczną dla Yankees). W Laboratorium Fizyki Stosowanej Johnsa Hopkinsa (Laboratorium Fizyki Stosowanej) pracownicy W.G. Guyer i J.K. Wiffenbach badali sygnał radiowy z radzieckiego Sputnika-1 i zwrócili uwagę na silne przesunięcie częstotliwości Dopplera sygnału emitowanego przez przelatującego satelitę. W miarę zbliżania się naszego pierworodnego w kosmosie częstotliwość sygnału wzrastała, a oddalający emitował sygnały radiowe o malejącej częstotliwości. Naukowcom udało się opracować program komputerowy do określania parametrów orbity obiektu latającego na podstawie jego sygnału radiowego w jednym przejściu. Oczywiście możliwa jest również odwrotna zasada - obliczenie znanych już parametrów orbity przy użyciu tego samego przesunięcia częstotliwości nieznanych współrzędnych naziemnego odbiornika radiowego. Pomysł ten wpadł na pomysł pracownika APL F.T. McClure'a, który wraz z dyrektorem laboratorium Richardem Kershnerem zebrał grupę badaczy do pracy nad projektem o nazwie Transit.

Richard Kershner (z lewej) jest jednym z ojców założycieli amerykańskiego Globalnego Systemu Pozycjonowania. Źródło: gpsworld.com

USS George Washington jest pierwszym użytkownikiem systemu Transit. Źródło: zonwar.ru
Orbity operacyjne konstelacji Tranzytu. Źródło: gpsworld.com
Głównym klientem była US Navy, która potrzebowała precyzyjnych narzędzi nawigacyjnych dla nowych okrętów podwodnych wyposażonych w pociski Polaris. Konieczność dokładnego określenia lokalizacji okrętów podwodnych typu George Washington była kluczowa dla ówczesnej nowości - wystrzelenia pocisków z głowicami nuklearnymi z dowolnego miejsca na świecie.


Sprzęt odbiorczy tranzytu dla okrętów podwodnych. Źródło: timeandnavigation.si.edu
Już w 1958 roku Amerykanie mogli zaprezentować pierwszą eksperymentalną próbkę satelity Transit, a 17 września 1959 wysłano go w kosmos. Stworzono również infrastrukturę naziemną - kompleks sprzętu nawigacyjnego dla konsumentów, a także stacje śledzenia naziemnego były gotowe do czasu uruchomienia.

Inżynierowie z Uniwersytetu Hopkinsa montują i testują statek kosmiczny Transit. Źródło: timeandnavigation.si.edu
Amerykanie pracowali nad projektem nawigacji satelitarnej z pełnym dopalaczem: do 1959 roku zaprojektowali aż pięć typów satelitów Transit, które później zostały wystrzelone i przetestowane. W trybie operacyjnym nawigacja amerykańska zaczęła działać w grudniu 1963 roku, czyli w niespełna pięć lat udało się stworzyć działający system, który wyróżniał się dobrą dokładnością na swój czas - błąd średniokwadratowy (RMS) dla obiekt stacjonarny miał 60 m.

Satelita Transit 5A model 1970. Źródło: timeandnavigation.si.edu

Odbiornik systemu Transit zainstalowany w pojeździe używanym przez geologa ze Smithsonian University Teda Maxwella na egipskiej pustyni w 1987 roku. Koniem roboczym badacza okazał się...

... radziecka "Niva"! Źródło: gpsworld.com[/center]
Ustalenie współrzędnych łodzi podwodnej poruszającej się po powierzchni było bardziej problematyczne: jeśli pomylisz się z wartością prędkości o 0,5 km / h, SCP wzrośnie do 500 m. Dlatego bardziej celowe było zwrócenie się do satelity o pomoc w stacjonarnej pozycji statku, co znowu nie było łatwe. Tranzyt o niskiej orbicie (wysokość 1100 km) został przyjęty przez Marynarkę Wojenną Stanów Zjednoczonych w połowie 64 roku jako część czterech satelitów, później sprowadzając konstelację orbitalną do siedmiu urządzeń, a od 67. nawigacja stała się dostępna dla zwykłych śmiertelników. W tej chwili konstelacja satelity Transit jest wykorzystywana do badania jonosfery. Wadami pierwszego na świecie systemu nawigacji satelitarnej były brak możliwości określenia wysokości położenia użytkownika naziemnego, znaczny czas trwania obserwacji oraz dokładność pozycjonowania obiektu, która ostatecznie stała się niewystarczająca. Wszystko to doprowadziło do nowych wyszukiwań w amerykańskim przemyśle kosmicznym.
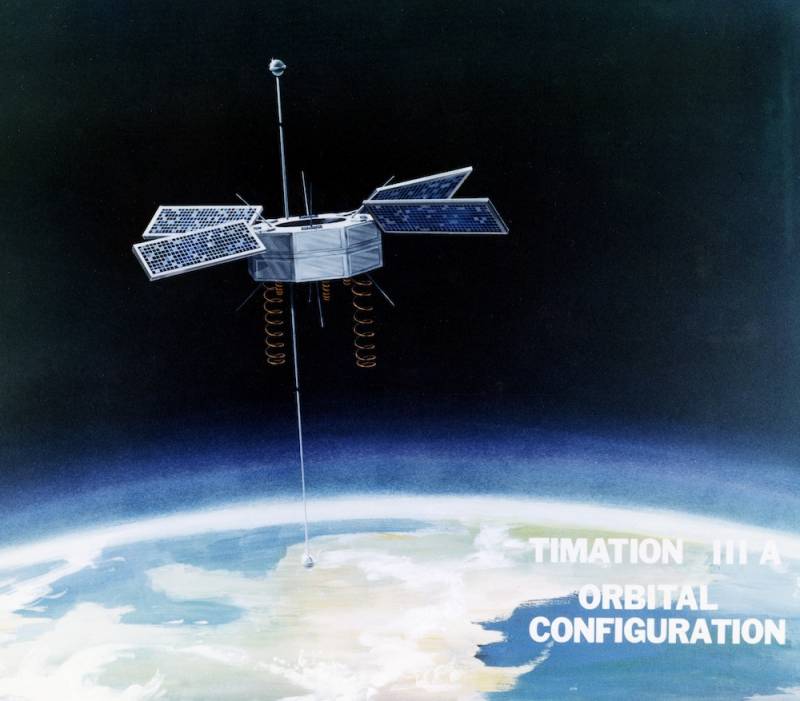
Statek kosmiczny czasu. Źródło: timeandnavigation.si.edu
Drugim z rzędu systemem nawigacji satelitarnej był Timation z Naval Research Laboratory (NRL - Naval Research Laboratory), którym kierował Roger Easton. W ramach projektu zmontowano dwa satelity, wyposażone w ultraprecyzyjne zegary do przesyłania sygnałów czasu do odbiorców naziemnych i dokładnego określania własnej lokalizacji.
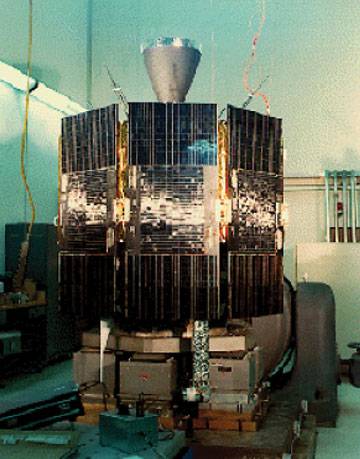
Eksperymentalny satelita Timation NTS-3 wyposażony w rubidowy zegar. Źródło: gpsworld.com
W Timation sformułowano podstawową zasadę działania przyszłych systemów GPS: nadajnik działał na satelicie, emitując zakodowany sygnał, który ustalał naziemnego abonenta i mierzył opóźnienie w jego przejściu. Znając dokładną lokalizację satelity na orbicie, sprzęt z łatwością obliczał odległość do niego i na podstawie tych danych określał własne współrzędne (efemerydy). Oczywiście wymaga to co najmniej trzech satelitów, a najlepiej czterech. Pierwsze Timations poleciały w kosmos w 1967 roku i nosiły na początku zegarki kwarcowe, a później ultraprecyzyjne atomowe – rubid i cez.
Siły Powietrzne Stanów Zjednoczonych, niezależnie od Marynarki Wojennej, posiadały własny globalny system pozycjonowania o nazwie System 621B (Air Force 621B). Trójwymiarowość stała się ważną innowacją tej techniki - teraz możliwe jest określenie szerokości i długości geograficznej oraz długo oczekiwanej wysokości obiektu. Sygnały satelitarne zostały oddzielone zgodnie z nową zasadą kodowania opartą na sygnale pseudolosowym podobnym do szumu. Kod pseudolosowy zwiększa odporność sygnału na zakłócenia i rozwiązuje problem ograniczenia dostępu. Cywilni użytkownicy sprzętu nawigacyjnego mają dostęp tylko do otwartych kodów, które w dowolnym momencie mogą być modyfikowane z naziemnego centrum kontroli. W takim przypadku cały „spokojny” sprzęt ulegnie awarii, określając własne współrzędne ze znacznym błędem. Zamknięte kody wojskowe pozostaną bez zmian.
Testy rozpoczęły się w 1972 roku na poligonie w Nowym Meksyku, wykorzystując nadajniki balonowe i samolotowe jako symulatory satelitów. „System 612B” wykazał się niezwykłą dokładnością pozycjonowania rzędu kilku metrów i to właśnie w tym czasie narodziła się koncepcja globalnego systemu nawigacji o średniej orbicie z 16 satelitami. W tej wersji klaster czterech satelitów (taka liczba jest niezbędna do dokładnej nawigacji) zapewniał całodobowy zasięg całego kontynentu. Przez kilka lat "System 24B" był w randze eksperymentalnej i nie interesował Pentagonu specjalnie. W tym samym czasie kilka biur w Stanach Zjednoczonych pracowało nad „gorącym” tematem nawigacyjnym: Laboratorium Fizyki Stosowanej pracowało nad modyfikacją Tranzytu, Marynarka Wojenna „kończył” Timation, a nawet siły lądowe oferowały własne SECOR (Sequential Correlation of Range, sekwencyjne obliczanie zakresów). Mogło to niepokoić Ministerstwo Obrony, które narażało się na ryzyko napotkania unikalnych formatów nawigacji w każdym typie wojsk. W pewnym momencie jeden z amerykańskich wojowników uderzył dłonią w stół i narodził się GPS, który wchłonął wszystko, co najlepsze ze swoich poprzedników. W połowie lat 612. pod auspicjami Departamentu Obrony USA utworzono trójstronny wspólny komitet o nazwie NAVSEG (Navigation Satellite Executive Group), który określił ważne parametry przyszłego systemu - liczbę satelitów, ich wysokości, kody sygnałowe i metody modulacji. Kiedy doszliśmy do kosztorysu, postanowiliśmy od razu stworzyć dwie opcje - wojskową i komercyjną z ustalonym z góry błędem w dokładności pozycjonowania. Siły Powietrzne odegrały wiodącą rolę w tym programie, ponieważ ich Air Force 70B był najbardziej rozbudowanym modelem przyszłego systemu nawigacyjnego, z którego GPS zapożyczył prawie niezmienioną technologię pseudolosowego szumu. System synchronizacji sygnału zaczerpnięto z projektu Timtation, ale orbitę podniesiono do 621 tysięcy kilometrów, co zapewniło 20-godzinny okres orbitalny zamiast 12-godzinnego poprzednika. Doświadczony satelita został wystrzelony w kosmos już w 8 roku i, jak zwykle, wstępnie przygotowano całą niezbędną infrastrukturę naziemną - wynaleziono tylko siedem rodzajów urządzeń odbiorczych. W 1978 r. GPS został w pełni wdrożony - około 1995 satelitów jest stale na orbicie, mimo że do pracy wystarczy 30. Przydzielono sześć samolotów orbitalnych dla satelitów o nachyleniu 240. W tej chwili aplikacje geodezyjne GPS pozwalają określić położenie konsumenta z dokładnością do mniej niż jednego milimetra! Od 1996 roku pojawiły się satelity Block 2R, wyposażone w autonomiczny system nawigacji AutoNav, który pozwala urządzeniu działać na orbicie, gdy naziemna stacja kontroli zostanie zniszczona przez co najmniej 180 dni.
Walka z GPS do końca lat 80. była epizodyczna i nieistotna: ustalanie współrzędnych pól minowych w Zatoce Perskiej i eliminowanie niedoskonałości map podczas inwazji na Panamę. Pełnoprawny chrzest bojowy miał miejsce w Zatoce Perskiej w latach 1990-1991 podczas „Pustynnej Burzy”. Wojska były w stanie aktywnie manewrować na pustyni, gdzie trudno jest znaleźć akceptowalne punkty orientacyjne, a także prowadzić ogień artyleryjski z dużą celnością o każdej porze dnia w warunkach burzy piaskowej. Później GPS okazał się przydatny w operacji pokojowej w Somalii w 1993 roku, w amerykańskich lądowaniach na Haiti w 1994 roku i wreszcie w kampaniach afgańskich i irackich w XXI wieku.
Richard Kershner (z lewej) jest jednym z ojców założycieli amerykańskiego Globalnego Systemu Pozycjonowania. Źródło: gpsworld.com

USS George Washington jest pierwszym użytkownikiem systemu Transit. Źródło: zonwar.ru
Orbity operacyjne konstelacji Tranzytu. Źródło: gpsworld.com
Głównym klientem była US Navy, która potrzebowała precyzyjnych narzędzi nawigacyjnych dla nowych okrętów podwodnych wyposażonych w pociski Polaris. Konieczność dokładnego określenia lokalizacji okrętów podwodnych typu George Washington była kluczowa dla ówczesnej nowości - wystrzelenia pocisków z głowicami nuklearnymi z dowolnego miejsca na świecie.
Sprzęt odbiorczy tranzytu dla okrętów podwodnych. Źródło: timeandnavigation.si.edu
Już w 1958 roku Amerykanie mogli zaprezentować pierwszą eksperymentalną próbkę satelity Transit, a 17 września 1959 wysłano go w kosmos. Stworzono również infrastrukturę naziemną - kompleks sprzętu nawigacyjnego dla konsumentów, a także stacje śledzenia naziemnego były gotowe do czasu uruchomienia.
Inżynierowie z Uniwersytetu Hopkinsa montują i testują statek kosmiczny Transit. Źródło: timeandnavigation.si.edu
Amerykanie pracowali nad projektem nawigacji satelitarnej z pełnym dopalaczem: do 1959 roku zaprojektowali aż pięć typów satelitów Transit, które później zostały wystrzelone i przetestowane. W trybie operacyjnym nawigacja amerykańska zaczęła działać w grudniu 1963 roku, czyli w niespełna pięć lat udało się stworzyć działający system, który wyróżniał się dobrą dokładnością na swój czas - błąd średniokwadratowy (RMS) dla obiekt stacjonarny miał 60 m.
Satelita Transit 5A model 1970. Źródło: timeandnavigation.si.edu

Odbiornik systemu Transit zainstalowany w pojeździe używanym przez geologa ze Smithsonian University Teda Maxwella na egipskiej pustyni w 1987 roku. Koniem roboczym badacza okazał się...

... radziecka "Niva"! Źródło: gpsworld.com[/center]
Ustalenie współrzędnych łodzi podwodnej poruszającej się po powierzchni było bardziej problematyczne: jeśli pomylisz się z wartością prędkości o 0,5 km / h, SCP wzrośnie do 500 m. Dlatego bardziej celowe było zwrócenie się do satelity o pomoc w stacjonarnej pozycji statku, co znowu nie było łatwe. Tranzyt o niskiej orbicie (wysokość 1100 km) został przyjęty przez Marynarkę Wojenną Stanów Zjednoczonych w połowie 64 roku jako część czterech satelitów, później sprowadzając konstelację orbitalną do siedmiu urządzeń, a od 67. nawigacja stała się dostępna dla zwykłych śmiertelników. W tej chwili konstelacja satelity Transit jest wykorzystywana do badania jonosfery. Wadami pierwszego na świecie systemu nawigacji satelitarnej były brak możliwości określenia wysokości położenia użytkownika naziemnego, znaczny czas trwania obserwacji oraz dokładność pozycjonowania obiektu, która ostatecznie stała się niewystarczająca. Wszystko to doprowadziło do nowych wyszukiwań w amerykańskim przemyśle kosmicznym.
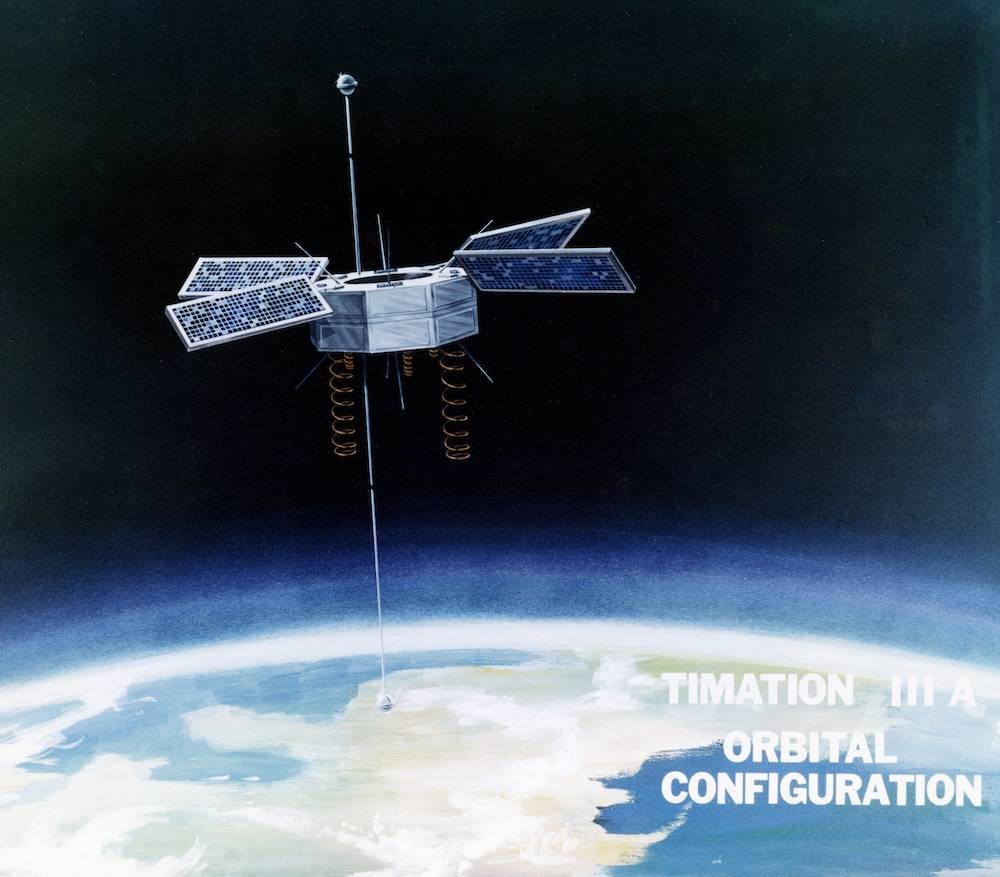
Statek kosmiczny czasu. Źródło: timeandnavigation.si.edu
Drugim z rzędu systemem nawigacji satelitarnej był Timation z Naval Research Laboratory (NRL - Naval Research Laboratory), którym kierował Roger Easton. W ramach projektu zmontowano dwa satelity, wyposażone w ultraprecyzyjne zegary do przesyłania sygnałów czasu do odbiorców naziemnych i dokładnego określania własnej lokalizacji.
Eksperymentalny satelita Timation NTS-3 wyposażony w rubidowy zegar. Źródło: gpsworld.com
W Timation sformułowano podstawową zasadę działania przyszłych systemów GPS: nadajnik działał na satelicie, emitując zakodowany sygnał, który ustalał naziemnego abonenta i mierzył opóźnienie w jego przejściu. Znając dokładną lokalizację satelity na orbicie, sprzęt z łatwością obliczał odległość do niego i na podstawie tych danych określał własne współrzędne (efemerydy). Oczywiście wymaga to co najmniej trzech satelitów, a najlepiej czterech. Pierwsze Timations poleciały w kosmos w 1967 roku i nosiły na początku zegarki kwarcowe, a później ultraprecyzyjne atomowe – rubid i cez.
Siły Powietrzne Stanów Zjednoczonych, niezależnie od Marynarki Wojennej, posiadały własny globalny system pozycjonowania o nazwie System 621B (Air Force 621B). Trójwymiarowość stała się ważną innowacją tej techniki - teraz możliwe jest określenie szerokości i długości geograficznej oraz długo oczekiwanej wysokości obiektu. Sygnały satelitarne zostały oddzielone zgodnie z nową zasadą kodowania opartą na sygnale pseudolosowym podobnym do szumu. Kod pseudolosowy zwiększa odporność sygnału na zakłócenia i rozwiązuje problem ograniczenia dostępu. Cywilni użytkownicy sprzętu nawigacyjnego mają dostęp tylko do otwartych kodów, które w dowolnym momencie mogą być modyfikowane z naziemnego centrum kontroli. W takim przypadku cały „spokojny” sprzęt ulegnie awarii, określając własne współrzędne ze znacznym błędem. Zamknięte kody wojskowe pozostaną bez zmian.
Testy rozpoczęły się w 1972 roku na poligonie w Nowym Meksyku, wykorzystując nadajniki balonowe i samolotowe jako symulatory satelitów. „System 612B” wykazał się niezwykłą dokładnością pozycjonowania rzędu kilku metrów i to właśnie w tym czasie narodziła się koncepcja globalnego systemu nawigacji o średniej orbicie z 16 satelitami. W tej wersji klaster czterech satelitów (taka liczba jest niezbędna do dokładnej nawigacji) zapewniał całodobowy zasięg całego kontynentu. Przez kilka lat "System 24B" był w randze eksperymentalnej i nie interesował Pentagonu specjalnie. W tym samym czasie kilka biur w Stanach Zjednoczonych pracowało nad „gorącym” tematem nawigacyjnym: Laboratorium Fizyki Stosowanej pracowało nad modyfikacją Tranzytu, Marynarka Wojenna „kończył” Timation, a nawet siły lądowe oferowały własne SECOR (Sequential Correlation of Range, sekwencyjne obliczanie zakresów). Mogło to niepokoić Ministerstwo Obrony, które narażało się na ryzyko napotkania unikalnych formatów nawigacji w każdym typie wojsk. W pewnym momencie jeden z amerykańskich wojowników uderzył dłonią w stół i narodził się GPS, który wchłonął wszystko, co najlepsze ze swoich poprzedników. W połowie lat 612. pod auspicjami Departamentu Obrony USA utworzono trójstronny wspólny komitet o nazwie NAVSEG (Navigation Satellite Executive Group), który określił ważne parametry przyszłego systemu - liczbę satelitów, ich wysokości, kody sygnałowe i metody modulacji. Kiedy doszliśmy do kosztorysu, postanowiliśmy od razu stworzyć dwie opcje - wojskową i komercyjną z ustalonym z góry błędem w dokładności pozycjonowania. Siły Powietrzne odegrały wiodącą rolę w tym programie, ponieważ ich Air Force 70B był najbardziej rozbudowanym modelem przyszłego systemu nawigacyjnego, z którego GPS zapożyczył prawie niezmienioną technologię pseudolosowego szumu. System synchronizacji sygnału zaczerpnięto z projektu Timtation, ale orbitę podniesiono do 621 tysięcy kilometrów, co zapewniło 20-godzinny okres orbitalny zamiast 12-godzinnego poprzednika. Doświadczony satelita został wystrzelony w kosmos już w 8 roku i, jak zwykle, wstępnie przygotowano całą niezbędną infrastrukturę naziemną - wynaleziono tylko siedem rodzajów urządzeń odbiorczych. W 1978 r. GPS został w pełni wdrożony - około 1995 satelitów jest stale na orbicie, mimo że do pracy wystarczy 30. Przydzielono sześć samolotów orbitalnych dla satelitów o nachyleniu 240. W tej chwili aplikacje geodezyjne GPS pozwalają określić położenie konsumenta z dokładnością do mniej niż jednego milimetra! Od 1996 roku pojawiły się satelity Block 2R, wyposażone w autonomiczny system nawigacji AutoNav, który pozwala urządzeniu działać na orbicie, gdy naziemna stacja kontroli zostanie zniszczona przez co najmniej 180 dni.
Walka z GPS do końca lat 80. była epizodyczna i nieistotna: ustalanie współrzędnych pól minowych w Zatoce Perskiej i eliminowanie niedoskonałości map podczas inwazji na Panamę. Pełnoprawny chrzest bojowy miał miejsce w Zatoce Perskiej w latach 1990-1991 podczas „Pustynnej Burzy”. Wojska były w stanie aktywnie manewrować na pustyni, gdzie trudno jest znaleźć akceptowalne punkty orientacyjne, a także prowadzić ogień artyleryjski z dużą celnością o każdej porze dnia w warunkach burzy piaskowej. Później GPS okazał się przydatny w operacji pokojowej w Somalii w 1993 roku, w amerykańskich lądowaniach na Haiti w 1994 roku i wreszcie w kampaniach afgańskich i irackich w XXI wieku.
informacja