Powolne, ale stałe tempo egzoszkieletów
Pół wieku po rozpoczęciu prac w dziedzinie egzoszkieletów pierwsze egzemplarze tego sprzętu są gotowe do pełnoprawnej pracy. Lockheed Martin pochwalił się niedawno, że jego projekt HULC (Human Universal Load Carrier) nie tylko przeszedł testy terenowe z Pentagonem, ale jest już gotowy do masowej produkcji. Egzoszkielet HULC „oddycha teraz” z kilku podobnych projektów innych firm. Ale taka obfitość struktur nie zawsze była.

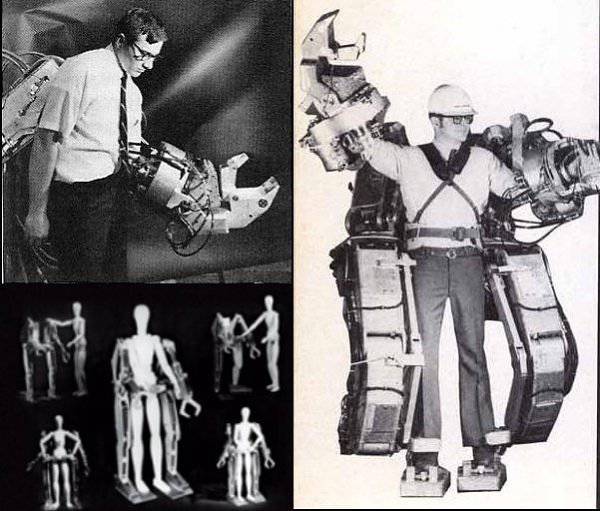
Właściwie pomysł stworzenia jakiegoś urządzenia, które człowiek mógłby założyć i znacząco poprawić jego cechy fizyczne, pojawił się w pierwszej połowie ubiegłego wieku. Jednak do pewnego czasu było to tylko kolejne pojęcie pisarzy science fiction. Dopiero pod koniec lat pięćdziesiątych rozpoczęto prace nad systemem praktycznie stosowanym. General Electric, pod auspicjami armii amerykańskiej, uruchomił projekt o nazwie Hardiman. Zadanie techniczne było odważne: egzoszkielet od GE miał pozwolić osobie operować z ładunkami o wadze do półtora tysiąca funtów (około 680 kilogramów). W przypadku pomyślnego zakończenia projektu egzoszkielet Hardimana miałby doskonałe perspektywy. Tak więc wojsko zamierzało wykorzystać nowy sprzęt, aby ułatwić pracę rusznikarzem w lotnictwie. Ponadto „w kolejce” stali naukowcy nuklearni, budowniczowie i przedstawiciele wielu innych branż. Ale nawet dziesięć lat po rozpoczęciu programu inżynierom General Electric nie udało się przełożyć wszystkiego, co zaplanowali, na metal. Zbudowano kilka prototypów, w tym działające ramię mechaniczne. Ogromny pazur „Hardimen” miał napęd hydrauliczny i mógł unieść 750 funtów ładunku (około 340 kg). Na podstawie jednej działającej „rękawicy” udało się stworzyć drugą. Ale projektanci stanęli przed innym problemem. Mechaniczne „nogi” egzoszkieletu nie chciały działać poprawnie. Prototyp Hardimana z jednym ramieniem i dwoma podporami ważył poniżej 750 kilogramów, a maksymalna nośność konstrukcji była mniejsza niż jego własna waga. Ze względu na ten ciężar i specyfikę centrowania egzoszkieletu podczas podnoszenia ładunku cała konstrukcja często zaczynała wibrować, co prowadziło do kilkukrotnego przewrócenia. Z gorzką ironią autorzy projektu nazwali to zjawisko „mechanicznym tańcem św. Wita”. Bez względu na to, jak ciężko walczyli konstruktorzy General Electric, nigdy nie radzili sobie z osiowaniem i wibracjami. Na samym początku lat 70. projekt Hardiman został zamknięty.
W kolejnych latach praca w kierunku egzoszkieletów była nieaktywna. Różne organizacje od czasu do czasu zaczęły się nimi zajmować, ale prawie zawsze nie następował właściwy wynik. Jednocześnie celem stworzenia egzoszkieletu nie zawsze było jego militarne zastosowanie. W latach 70-tych pracownicy Massachusetts Institute of Technology bez większych sukcesów opracowali sprzęt tej klasy, przeznaczony do rehabilitacji osób niepełnosprawnych z urazami układu mięśniowo-szkieletowego. Niestety w tym czasie na drodze inżynierów pojawiły się również problemy z synchronizacją różnych elementów skafandra. Należy zauważyć, że egzoszkielety posiadają szereg charakterystycznych cech, które w najmniejszym stopniu nie ułatwiają ich tworzenia. Stąd znaczna poprawa możliwości fizycznych operatora wymaga odpowiedniego źródła energii. Ten ostatni z kolei zwiększa wymiary i ciężar własny całego aparatu. Drugi problem polega na interakcji człowieka i egzoszkieletu. Zasada działania takiego sprzętu jest następująca: osoba wykonuje dowolny ruch ręką lub stopą. Specjalne czujniki powiązane z jego kończynami odbierają ten sygnał i przekazują odpowiednią komendę do siłowników - mechanizmów hydro- lub elektrycznych. Jednocześnie z wydawaniem poleceń te same czujniki zapewniają, że ruch manipulatorów odpowiada ruchom operatora. Oprócz synchronizacji amplitud ruchu inżynierowie zmagają się z kwestią synchronizacji. Faktem jest, że każda mechanika ma pewien czas reakcji. Dlatego należy go zminimalizować, aby zapewnić wystarczającą wygodę korzystania z egzoszkieletu. W przypadku małych zwartych egzoszkieletów, na które obecnie zwraca się uwagę, synchronizacja ruchów człowieka i maszyny ma szczególny priorytet. Ponieważ kompaktowy egzoszkielet nie pozwala na większą powierzchnię nośną itp., mechanicy, którzy nie mają czasu na poruszanie się z osobą, mogą negatywnie wpłynąć na użytkowanie. Na przykład przedwczesny ruch mechanicznej „nogi” może prowadzić do tego, że osoba po prostu traci równowagę i upada. I to nie wszystkie problemy. Oczywiście ludzka stopa ma mniej stopni swobody niż ręka, nie mówiąc już o dłoni i palcach.
Najnowszy historia egzoszkielety wojskowe rozpoczęły się w 2000 roku. Następnie amerykańska agencja DARPA zainicjowała start programu EHPA (Exoskeletons for Human Performance Augmentation - Exoskeletons to zwiększenie ludzkiej wydajności). Program EHPA był częścią większego projektu Land Warrior, który obejmował stworzenie wyglądu żołnierza przyszłości. Jednak w 2007 roku Land Warrior został odwołany, ale jego egzoszkieletowa część była kontynuowana. Celem projektu EHPA było stworzenie tzw. kompletny egzoszkielet, który zawierał wzmacniacze rąk i nóg osoby. Jednocześnie nie była wymagana żadna broń ani zbroja. Odpowiedzialni urzędnicy DARPA i Pentagonu doskonale zdawali sobie sprawę, że obecny stan rzeczy w dziedzinie egzoszkieletów po prostu nie pozwala na wyposażenie ich w dodatkowe funkcje. Dlatego zakres zadań programu EHPA implikuje jedynie możliwość długotrwałego przenoszenia przez żołnierza w egzoszkielecie ładunku o wadze około 100 kilogramów i zwiększenia jego szybkości poruszania się.
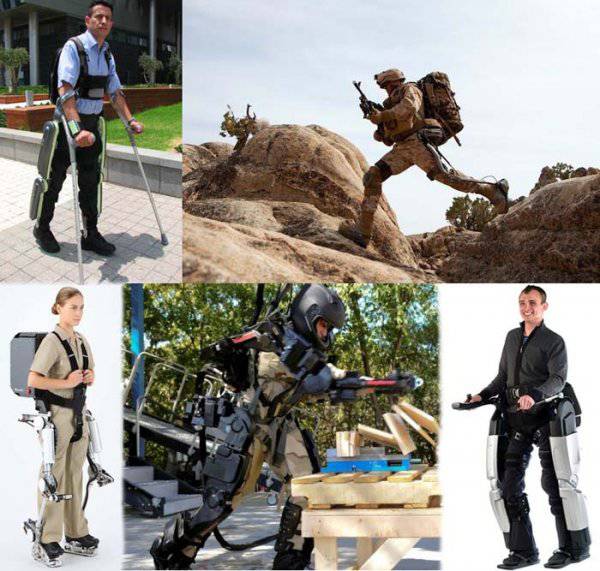
Sacros i University of Berkeley (USA) oraz japońskie Cyberdyne Systems wyraziły chęć uczestniczenia w rozwoju nowej technologii. Od rozpoczęcia programu minęło dwanaście lat iw tym czasie skład uczestników uległ pewnym zmianom. Do tej pory Sacros stało się częścią koncernu Raytheon, a wydział uniwersytecki Berkeley Bionics stał się oddziałem Lockheed Martin. Tak czy inaczej istnieją obecnie trzy prototypowe egzoszkielety stworzone w ramach programu EHPA: Lockheed Martin HULC, Cyberdyne HAL i Raytheon XOS.
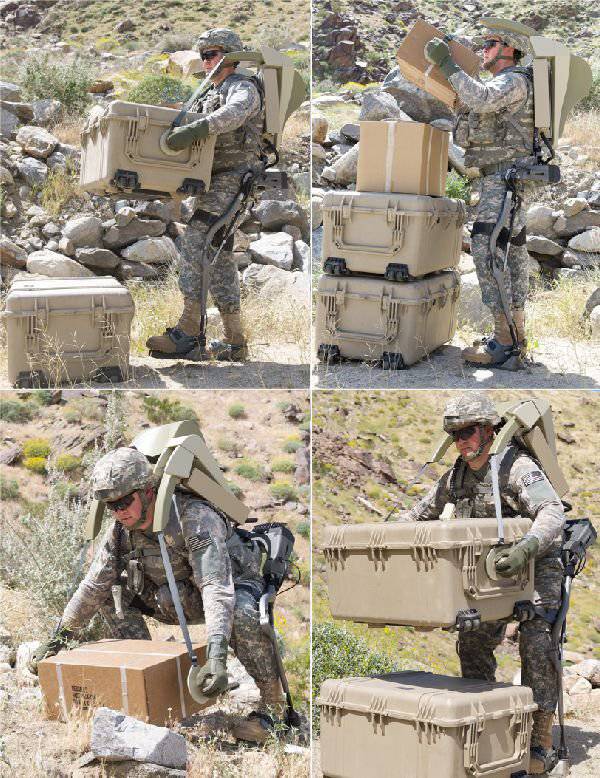
Pierwszy z tych egzoszkieletów – HULC – nie spełnia w pełni wymagań DARPA. Faktem jest, że 25-kilogramowa konstrukcja zawiera tylko system podparcia pleców i mechaniczne „nogi”. W HULC nie zaimplementowano podparcia dłoni. Jednocześnie zwiększają się możliwości fizyczne operatora HULC, ponieważ poprzez system podparcia pleców większość obciążenia rąk jest przenoszona na elementy mocy egzoszkieletu i w rezultacie „odchodzi” do Ziemia. Dzięki zastosowanemu systemowi żołnierz może przewieźć do 90 kilogramów ładunku i jednocześnie doświadczyć ładunku spełniającego wszelkie standardy wojskowe. HULC wyposażony jest w akumulator litowo-jonowy, którego pojemność wystarcza na osiem godzin pracy. W trybie ekonomicznym osoba w egzoszkielecie może chodzić z prędkością 4-5 kilometrów na godzinę. Maksymalna możliwa prędkość HULC to 17-18 km/h, jednak taki tryb pracy układu znacznie skraca czas pracy z jednego ładowania akumulatora. W przyszłości Lockheed Martin obiecuje wyposażyć HULC w ogniwa paliwowe, których pojemność wystarczy na dzień pracy. Ponadto w przyszłych wersjach projektanci obiecują „zrobotyzować” dłonie, co znacznie zwiększy możliwości użytkownika egzoszkieletu.

Raytheon wprowadził obecnie dwa nieco podobne egzoszkielety o indeksach XOS-1 i XOS-2. Różnią się parametrami wagowymi i rozmiarowymi, a co za tym idzie szeregiem praktycznych cech. W przeciwieństwie do HULC, rodzina XOS jest wyposażona w system odciążenia dłoni. Oba te egzoszkielety mogą unieść ciężar porównywalny z ich wagą około 80-90 kilogramów. Na uwagę zasługuje fakt, że konstrukcja obu XOS-ów pozwala na montaż różnych manipulatorów na rękach mechanicznych. Należy zauważyć, że XOS-1 i XOS-2 mają do tej pory znaczny pobór mocy. Z tego powodu nie są jeszcze autonomiczne i wymagają zewnętrznego zasilania. W związku z tym nie ma mowy o maksymalnej prędkości ruchu i żywotności baterii. Jednak zdaniem Raytheona potrzeba zasilania kablowego nie będzie przeszkodą w zastosowaniu XOS-a w magazynach czy bazach wojskowych, gdzie istnieje odpowiednie źródło prądu.

Trzecim przykładem programu EHPA jest Cyberdyne HAL. Obecna wersja to HAL-5. Ten egzoszkielet jest do pewnego stopnia mieszanką dwóch pierwszych. Podobnie jak HULC ma możliwość samodzielnego użytkowania - baterie wystarczają na 2,5-3 godziny. W przypadku rodziny XOS rozwój Cyberdyne Systems łączy „kompletność” projektu: obejmuje on systemy wsparcia zarówno dla ramion, jak i nóg. Jednak nośność HAL-5 nie przekracza kilkudziesięciu kilogramów. Podobnie sytuacja ma się z cechami szybkości tego rozwoju. Faktem jest, że japońscy projektanci skupili się nie na zastosowaniach wojskowych, ale na rehabilitacji osób niepełnosprawnych. Oczywiście tacy użytkownicy po prostu nie potrzebują dużej prędkości ani ładowności. W związku z tym, jeśli HAL-5 w obecnym stanie zainteresuje wojsko, możliwe będzie wykonanie na jego podstawie nowego egzoszkieletu, zaostrzonego do celów wojskowych.
Ze wszystkich opcji obiecujących egzoszkieletów zgłoszonych do konkursu EHPA tylko HULC przeszedł do tej pory testy wspólnie z wojskiem. Szereg funkcji innych projektów nadal nie pozwala im na rozpoczęcie testów w terenie. We wrześniu kilka zestawów HULC zostanie wysłanych do jednostek w celu zbadania cech egzoszkieletu w rzeczywistych warunkach. Jeśli wszystko pójdzie bez problemów, to w latach 2014-15 rozpocznie się produkcja na dużą skalę.
W międzyczasie naukowcy i projektanci będą mieli bardziej zaawansowane koncepcje i projekty. Najbardziej oczekiwaną innowacją w dziedzinie egzoszkieletów są rękawice robotyczne. Dostępne manipulatory nie są jeszcze zbyt wygodne do korzystania z narzędzi i podobnych obiektów przeznaczonych do użytku ręcznego. Jednocześnie stworzenie takich rękawic wiąże się z szeregiem trudności. Generalnie są one podobne do tych z innych egzoszkieletów, ale w tym przypadku problemy z synchronizacją potęguje duża liczba elementów mechanicznych, cechy ruchu ludzkiej ręki itp. Kolejnym krokiem w rozwoju egzoszkieletów będzie stworzenie interfejsu neuroelektronicznego. Teraz sterowanie ruchami mechaniki odbywa się za pomocą czujników i serwonapędów. Dla inżynierów i naukowców wygodniejsze jest zastosowanie systemu sterowania z elektrodami, które rejestrują ludzkie impulsy nerwowe. Taki system skróci między innymi czas reakcji mechanizmów, a w efekcie zwiększy wydajność całego egzoszkieletu.
Jeśli chodzi o praktyczne zastosowanie, w ciągu ostatniego półwiecza poglądy na ten temat niewiele się zmieniły. Tak jak poprzednio, głównymi użytkownikami obiecujących systemów są wojsko. Mogą wykorzystywać egzoszkielety do załadunku i rozładunku, przygotowania amunicji, a dodatkowo w sytuacji bojowej do zwiększenia możliwości myśliwców. Należy zauważyć, że nośność egzoszkieletów przyda się nie tylko wojsku. Powszechne wykorzystanie technologii, która pozwala znacznie zwiększyć możliwości fizyczne człowieka, może zmienić oblicze całej logistyki i transportu ładunków. Na przykład czas załadunku naczepy towarowej w przypadku braku wózków widłowych skróci się o kilkadziesiąt procent, co zwiększy wydajność całego systemu transportowego. Wreszcie, egzoszkielety sterowane impulsami nerwowymi pomogą niepełnosprawnym kibicom znów żyć pełnią życia. Co więcej, wielkie nadzieje wiąże się właśnie z interfejsem neuroelektronicznym: w przypadku urazów kręgosłupa itp. W przypadku urazu sygnały z mózgu mogą nie docierać do niektórych obszarów ciała. Jeśli jednak zostaną „przechwycone” do uszkodzonego obszaru nerwu i wysłane do systemu kontroli egzoszkieletu, to osoba nie będzie już przykuta do wózka inwalidzkiego lub łóżka. W ten sposób rozwój wojska może ponownie poprawić życie nie tylko wojska. Na razie, snując wielkie plany, należy pamiętać o próbnej eksploatacji egzoszkieletu Lockheed Martin HULC, która rozpocznie się dopiero jesienią. Na podstawie jego wyników będzie można ocenić zarówno perspektywy dla całej branży, jak i zainteresowanie nią ze strony potencjalnych użytkowników.
Na podstawie materiałów z witryn:
http://darpa.mil/
http://davidszondy.com/
http://lockheedmartin.com/
http://raytheon.com/
http://cyberdyne.jp/
http://rosbalt.ru/
Właściwie pomysł stworzenia jakiegoś urządzenia, które człowiek mógłby założyć i znacząco poprawić jego cechy fizyczne, pojawił się w pierwszej połowie ubiegłego wieku. Jednak do pewnego czasu było to tylko kolejne pojęcie pisarzy science fiction. Dopiero pod koniec lat pięćdziesiątych rozpoczęto prace nad systemem praktycznie stosowanym. General Electric, pod auspicjami armii amerykańskiej, uruchomił projekt o nazwie Hardiman. Zadanie techniczne było odważne: egzoszkielet od GE miał pozwolić osobie operować z ładunkami o wadze do półtora tysiąca funtów (około 680 kilogramów). W przypadku pomyślnego zakończenia projektu egzoszkielet Hardimana miałby doskonałe perspektywy. Tak więc wojsko zamierzało wykorzystać nowy sprzęt, aby ułatwić pracę rusznikarzem w lotnictwie. Ponadto „w kolejce” stali naukowcy nuklearni, budowniczowie i przedstawiciele wielu innych branż. Ale nawet dziesięć lat po rozpoczęciu programu inżynierom General Electric nie udało się przełożyć wszystkiego, co zaplanowali, na metal. Zbudowano kilka prototypów, w tym działające ramię mechaniczne. Ogromny pazur „Hardimen” miał napęd hydrauliczny i mógł unieść 750 funtów ładunku (około 340 kg). Na podstawie jednej działającej „rękawicy” udało się stworzyć drugą. Ale projektanci stanęli przed innym problemem. Mechaniczne „nogi” egzoszkieletu nie chciały działać poprawnie. Prototyp Hardimana z jednym ramieniem i dwoma podporami ważył poniżej 750 kilogramów, a maksymalna nośność konstrukcji była mniejsza niż jego własna waga. Ze względu na ten ciężar i specyfikę centrowania egzoszkieletu podczas podnoszenia ładunku cała konstrukcja często zaczynała wibrować, co prowadziło do kilkukrotnego przewrócenia. Z gorzką ironią autorzy projektu nazwali to zjawisko „mechanicznym tańcem św. Wita”. Bez względu na to, jak ciężko walczyli konstruktorzy General Electric, nigdy nie radzili sobie z osiowaniem i wibracjami. Na samym początku lat 70. projekt Hardiman został zamknięty.
W kolejnych latach praca w kierunku egzoszkieletów była nieaktywna. Różne organizacje od czasu do czasu zaczęły się nimi zajmować, ale prawie zawsze nie następował właściwy wynik. Jednocześnie celem stworzenia egzoszkieletu nie zawsze było jego militarne zastosowanie. W latach 70-tych pracownicy Massachusetts Institute of Technology bez większych sukcesów opracowali sprzęt tej klasy, przeznaczony do rehabilitacji osób niepełnosprawnych z urazami układu mięśniowo-szkieletowego. Niestety w tym czasie na drodze inżynierów pojawiły się również problemy z synchronizacją różnych elementów skafandra. Należy zauważyć, że egzoszkielety posiadają szereg charakterystycznych cech, które w najmniejszym stopniu nie ułatwiają ich tworzenia. Stąd znaczna poprawa możliwości fizycznych operatora wymaga odpowiedniego źródła energii. Ten ostatni z kolei zwiększa wymiary i ciężar własny całego aparatu. Drugi problem polega na interakcji człowieka i egzoszkieletu. Zasada działania takiego sprzętu jest następująca: osoba wykonuje dowolny ruch ręką lub stopą. Specjalne czujniki powiązane z jego kończynami odbierają ten sygnał i przekazują odpowiednią komendę do siłowników - mechanizmów hydro- lub elektrycznych. Jednocześnie z wydawaniem poleceń te same czujniki zapewniają, że ruch manipulatorów odpowiada ruchom operatora. Oprócz synchronizacji amplitud ruchu inżynierowie zmagają się z kwestią synchronizacji. Faktem jest, że każda mechanika ma pewien czas reakcji. Dlatego należy go zminimalizować, aby zapewnić wystarczającą wygodę korzystania z egzoszkieletu. W przypadku małych zwartych egzoszkieletów, na które obecnie zwraca się uwagę, synchronizacja ruchów człowieka i maszyny ma szczególny priorytet. Ponieważ kompaktowy egzoszkielet nie pozwala na większą powierzchnię nośną itp., mechanicy, którzy nie mają czasu na poruszanie się z osobą, mogą negatywnie wpłynąć na użytkowanie. Na przykład przedwczesny ruch mechanicznej „nogi” może prowadzić do tego, że osoba po prostu traci równowagę i upada. I to nie wszystkie problemy. Oczywiście ludzka stopa ma mniej stopni swobody niż ręka, nie mówiąc już o dłoni i palcach.
Najnowszy historia egzoszkielety wojskowe rozpoczęły się w 2000 roku. Następnie amerykańska agencja DARPA zainicjowała start programu EHPA (Exoskeletons for Human Performance Augmentation - Exoskeletons to zwiększenie ludzkiej wydajności). Program EHPA był częścią większego projektu Land Warrior, który obejmował stworzenie wyglądu żołnierza przyszłości. Jednak w 2007 roku Land Warrior został odwołany, ale jego egzoszkieletowa część była kontynuowana. Celem projektu EHPA było stworzenie tzw. kompletny egzoszkielet, który zawierał wzmacniacze rąk i nóg osoby. Jednocześnie nie była wymagana żadna broń ani zbroja. Odpowiedzialni urzędnicy DARPA i Pentagonu doskonale zdawali sobie sprawę, że obecny stan rzeczy w dziedzinie egzoszkieletów po prostu nie pozwala na wyposażenie ich w dodatkowe funkcje. Dlatego zakres zadań programu EHPA implikuje jedynie możliwość długotrwałego przenoszenia przez żołnierza w egzoszkielecie ładunku o wadze około 100 kilogramów i zwiększenia jego szybkości poruszania się.
Sacros i University of Berkeley (USA) oraz japońskie Cyberdyne Systems wyraziły chęć uczestniczenia w rozwoju nowej technologii. Od rozpoczęcia programu minęło dwanaście lat iw tym czasie skład uczestników uległ pewnym zmianom. Do tej pory Sacros stało się częścią koncernu Raytheon, a wydział uniwersytecki Berkeley Bionics stał się oddziałem Lockheed Martin. Tak czy inaczej istnieją obecnie trzy prototypowe egzoszkielety stworzone w ramach programu EHPA: Lockheed Martin HULC, Cyberdyne HAL i Raytheon XOS.
Pierwszy z tych egzoszkieletów – HULC – nie spełnia w pełni wymagań DARPA. Faktem jest, że 25-kilogramowa konstrukcja zawiera tylko system podparcia pleców i mechaniczne „nogi”. W HULC nie zaimplementowano podparcia dłoni. Jednocześnie zwiększają się możliwości fizyczne operatora HULC, ponieważ poprzez system podparcia pleców większość obciążenia rąk jest przenoszona na elementy mocy egzoszkieletu i w rezultacie „odchodzi” do Ziemia. Dzięki zastosowanemu systemowi żołnierz może przewieźć do 90 kilogramów ładunku i jednocześnie doświadczyć ładunku spełniającego wszelkie standardy wojskowe. HULC wyposażony jest w akumulator litowo-jonowy, którego pojemność wystarcza na osiem godzin pracy. W trybie ekonomicznym osoba w egzoszkielecie może chodzić z prędkością 4-5 kilometrów na godzinę. Maksymalna możliwa prędkość HULC to 17-18 km/h, jednak taki tryb pracy układu znacznie skraca czas pracy z jednego ładowania akumulatora. W przyszłości Lockheed Martin obiecuje wyposażyć HULC w ogniwa paliwowe, których pojemność wystarczy na dzień pracy. Ponadto w przyszłych wersjach projektanci obiecują „zrobotyzować” dłonie, co znacznie zwiększy możliwości użytkownika egzoszkieletu.
Raytheon wprowadził obecnie dwa nieco podobne egzoszkielety o indeksach XOS-1 i XOS-2. Różnią się parametrami wagowymi i rozmiarowymi, a co za tym idzie szeregiem praktycznych cech. W przeciwieństwie do HULC, rodzina XOS jest wyposażona w system odciążenia dłoni. Oba te egzoszkielety mogą unieść ciężar porównywalny z ich wagą około 80-90 kilogramów. Na uwagę zasługuje fakt, że konstrukcja obu XOS-ów pozwala na montaż różnych manipulatorów na rękach mechanicznych. Należy zauważyć, że XOS-1 i XOS-2 mają do tej pory znaczny pobór mocy. Z tego powodu nie są jeszcze autonomiczne i wymagają zewnętrznego zasilania. W związku z tym nie ma mowy o maksymalnej prędkości ruchu i żywotności baterii. Jednak zdaniem Raytheona potrzeba zasilania kablowego nie będzie przeszkodą w zastosowaniu XOS-a w magazynach czy bazach wojskowych, gdzie istnieje odpowiednie źródło prądu.

Trzecim przykładem programu EHPA jest Cyberdyne HAL. Obecna wersja to HAL-5. Ten egzoszkielet jest do pewnego stopnia mieszanką dwóch pierwszych. Podobnie jak HULC ma możliwość samodzielnego użytkowania - baterie wystarczają na 2,5-3 godziny. W przypadku rodziny XOS rozwój Cyberdyne Systems łączy „kompletność” projektu: obejmuje on systemy wsparcia zarówno dla ramion, jak i nóg. Jednak nośność HAL-5 nie przekracza kilkudziesięciu kilogramów. Podobnie sytuacja ma się z cechami szybkości tego rozwoju. Faktem jest, że japońscy projektanci skupili się nie na zastosowaniach wojskowych, ale na rehabilitacji osób niepełnosprawnych. Oczywiście tacy użytkownicy po prostu nie potrzebują dużej prędkości ani ładowności. W związku z tym, jeśli HAL-5 w obecnym stanie zainteresuje wojsko, możliwe będzie wykonanie na jego podstawie nowego egzoszkieletu, zaostrzonego do celów wojskowych.
Ze wszystkich opcji obiecujących egzoszkieletów zgłoszonych do konkursu EHPA tylko HULC przeszedł do tej pory testy wspólnie z wojskiem. Szereg funkcji innych projektów nadal nie pozwala im na rozpoczęcie testów w terenie. We wrześniu kilka zestawów HULC zostanie wysłanych do jednostek w celu zbadania cech egzoszkieletu w rzeczywistych warunkach. Jeśli wszystko pójdzie bez problemów, to w latach 2014-15 rozpocznie się produkcja na dużą skalę.
W międzyczasie naukowcy i projektanci będą mieli bardziej zaawansowane koncepcje i projekty. Najbardziej oczekiwaną innowacją w dziedzinie egzoszkieletów są rękawice robotyczne. Dostępne manipulatory nie są jeszcze zbyt wygodne do korzystania z narzędzi i podobnych obiektów przeznaczonych do użytku ręcznego. Jednocześnie stworzenie takich rękawic wiąże się z szeregiem trudności. Generalnie są one podobne do tych z innych egzoszkieletów, ale w tym przypadku problemy z synchronizacją potęguje duża liczba elementów mechanicznych, cechy ruchu ludzkiej ręki itp. Kolejnym krokiem w rozwoju egzoszkieletów będzie stworzenie interfejsu neuroelektronicznego. Teraz sterowanie ruchami mechaniki odbywa się za pomocą czujników i serwonapędów. Dla inżynierów i naukowców wygodniejsze jest zastosowanie systemu sterowania z elektrodami, które rejestrują ludzkie impulsy nerwowe. Taki system skróci między innymi czas reakcji mechanizmów, a w efekcie zwiększy wydajność całego egzoszkieletu.
Jeśli chodzi o praktyczne zastosowanie, w ciągu ostatniego półwiecza poglądy na ten temat niewiele się zmieniły. Tak jak poprzednio, głównymi użytkownikami obiecujących systemów są wojsko. Mogą wykorzystywać egzoszkielety do załadunku i rozładunku, przygotowania amunicji, a dodatkowo w sytuacji bojowej do zwiększenia możliwości myśliwców. Należy zauważyć, że nośność egzoszkieletów przyda się nie tylko wojsku. Powszechne wykorzystanie technologii, która pozwala znacznie zwiększyć możliwości fizyczne człowieka, może zmienić oblicze całej logistyki i transportu ładunków. Na przykład czas załadunku naczepy towarowej w przypadku braku wózków widłowych skróci się o kilkadziesiąt procent, co zwiększy wydajność całego systemu transportowego. Wreszcie, egzoszkielety sterowane impulsami nerwowymi pomogą niepełnosprawnym kibicom znów żyć pełnią życia. Co więcej, wielkie nadzieje wiąże się właśnie z interfejsem neuroelektronicznym: w przypadku urazów kręgosłupa itp. W przypadku urazu sygnały z mózgu mogą nie docierać do niektórych obszarów ciała. Jeśli jednak zostaną „przechwycone” do uszkodzonego obszaru nerwu i wysłane do systemu kontroli egzoszkieletu, to osoba nie będzie już przykuta do wózka inwalidzkiego lub łóżka. W ten sposób rozwój wojska może ponownie poprawić życie nie tylko wojska. Na razie, snując wielkie plany, należy pamiętać o próbnej eksploatacji egzoszkieletu Lockheed Martin HULC, która rozpocznie się dopiero jesienią. Na podstawie jego wyników będzie można ocenić zarówno perspektywy dla całej branży, jak i zainteresowanie nią ze strony potencjalnych użytkowników.
Na podstawie materiałów z witryn:
http://darpa.mil/
http://davidszondy.com/
http://lockheedmartin.com/
http://raytheon.com/
http://cyberdyne.jp/
http://rosbalt.ru/
informacja