Główne krajowe osiągnięcia w dziedzinie autonomicznych niezamieszkałych pojazdów podwodnych

ANPA „klawesyn-1R” na próbach. Fot. IPMT LUTY RAS
W ostatnich dziesięcioleciach rosyjski departament wojskowy i przemysł obronny aktywnie zaangażowały się w rozwój autonomicznych bezludnych pojazdów podwodnych (AUV). Produkty tej klasy mogą mieć różne wymiary, cechy i możliwości, które zapewniają rozwiązanie zadań bojowych i pomocniczych – i dlatego cieszą się dużym zainteresowaniem flota. Szereg nowoczesnych AUV zostało już wprowadzonych do użytku, a teraz taki sprzęt jest używany w rzeczywistych operacjach. Ponadto oczekuje się przyjęcia szeregu innych próbek.
kierunek głębokiego morza
Pierwszy nowoczesny AUV, wprowadzony do rzeczywistej eksploatacji, jest uważany za ciężki Harpsichord-1R. Produkt ten został opracowany przez Instytut Problemów Techniki Morskiej Dalekowschodniego Oddziału Rosyjskiej Akademii Nauk (IPMT FEB RAS) na początku lat 2005. W latach 2006-2007 na Dalekim Wschodzie przeprowadzono próby morskie eksperymentalnej aparatury, aw XNUMX roku przeprowadzono próbną eksploatację w Arktyce.
Pod koniec dekady nowy AUV został przyjęty na dostawy do Marynarki Wojennej; Klientowi przekazano kilka urządzeń i związanych z nimi produktów. Poinformowano również, że producent jest gotowy do budowy nowych urządzeń dla kolejnych klientów. Od końca 1 roku urządzenia Harpsichord-XNUMXR są regularnie używane w różnych operacjach poszukiwawczych i badawczych.

Później „klawesyn-2R-PM”. Fot. TsKB „Rubin”
AUV „Klawesyn-1R” wykonany jest w cylindrycznym korpusie o długości 5,8 m i średnicy 0,9 m. Masa całkowita - 2,5 t. Urządzenie rozwija prędkość ok. 3 węzły i może działać na głębokościach do 6 km. Na pokładzie zainstalowana jest różnorodna aparatura naukowa, odpowiadająca zadaniu. Przede wszystkim są to kamery wideo i stacje hydroakustyczne.
W pierwszej połowie 2 roku Centralne Biuro Projektowe Rubina opracowało nowy ANPA, Harpsichord-XNUMXR-PM. W połowie dekady zakończono produkcję prototypu, który następnie trafił na testy. Według różnych źródeł działania te nadal trwają, a urządzenie nie zostało jeszcze oddane do użytku.
Według otwartych źródeł, produkt "Klawesyn-2R-PM" jest większy i cięższy niż urządzenie poprzedniego modelu, a także ma inne właściwości jezdne. Można na nim zainstalować różne instrumenty naukowe. Ta technika jest przeznaczona do pracy z okrętem podwodnym przewoźnika. Będzie to atomowy okręt podwodny „Biełgorod”, przebudowany według specjalnego projektu 09852.

Aparat „Witiaź-D”. Fot. TsKB „Rubin”
W 2018 roku rozpoczęła się budowa obiecującego Vityaz-D AUV, opracowanego w Centralnym Biurze Konstrukcyjnym Rubin. Poinformowano, że jest to aparatura badawcza zdolna do działania w najgłębszych partiach oceanów. W 2019 roku produkt został wyjęty do testów, a w maju 2020 roku zatonął na dnie Rowu Mariańskiego i zanotował głębokość ponad 10 km.
„Vityaz-D” ma długość 5,5 m przy średnicy nie większej niż 1,5 m. Konstrukcja urządzenia jest przeznaczona do nurkowania na głębokość 12 km. Jest elektrownia z 4 napędami i 10 silnikami odrzutowymi. Autonomia osiąga 1 dzień. Na pokładzie Vityaz-D znajdują się kamery wideo i przyrządy pomiarowe. Według różnych źródeł możliwe jest zainstalowanie dodatkowego sprzętu do celów naukowych lub innych.
Klasa średnia
Na początku lat 2012-tych w IPMT FEB RAS powstał kolejny projekt AUV o nazwie MT-2012 Galtel. Testy eksperymentalnego sprzętu tego typu rozpoczęły się w 2017 roku na Dalekim Wschodzie. Kilka lat później kompleksy eksperymentalne zostały przekazane Flocie Pacyfiku w celu opracowania. Najwyraźniej w przyszłości taki sprzęt pojawił się w dyspozycji innych flot. Od 18-XNUMX Produkty firmy Galtel są wykorzystywane w bazie Tartus w Syrii do badania akwenu i dna w celu poszukiwania potencjalnie niebezpiecznych obiektów.

Podwodny „szybowiec” typu „Cień morski”. Zdjęcie "Okeanos"
Kompleks Galtel obejmuje kilka autonomicznych pojazdów i elementów sterujących. Można go również uzupełnić zdalnie sterowanymi pojazdami podwodnymi odpowiedniego typu. Sam Galtel ma ponad 2 m długości i waży 180 kg. Elektrownia pozwala poruszać się z prędkością 4,3 węzła; zasięg przelotowy - 100 km. Zapewnia pracę na głębokościach do 400 m.
AUV jest wyposażony w sonar boczny, kamery wideo i sonarowe pomoce nawigacyjne. Istnieje kilka trybów pracy z różnymi funkcjami. W szczególności "Galtel" jest w stanie wykryć podejrzane obiekty na badanym obszarze. Po wykryciu urządzenie wyskakuje i przesyła operatorowi zdjęcie oraz film obiektu. Z innym pod wodą robot operator może dokładnie zbadać znaleziony przedmiot i podjąć działania.
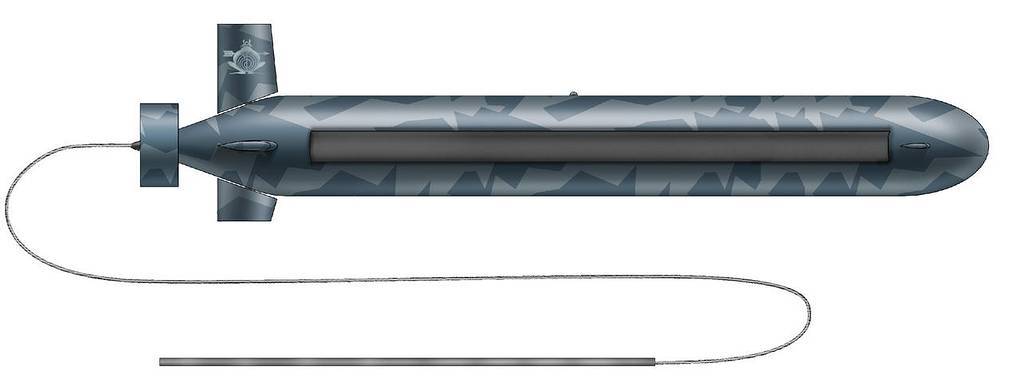
Zadania geodezyjne akwenów mogą być również wykonywane przez AUV „Sea Shadow” lub „Glider”, opracowany przez Petersburski Państwowy Morski Uniwersytet Techniczny (SPbGMTU) i przedsiębiorstwo Okeanos. Prace nad tym tematem rozpoczęły się w 2012 roku, aw 2016 roku przetestowano eksperymentalną aparaturę. W przyszłości dopracowano pierwszą wersję szybowca, a także opracowano nowe modyfikacje i ulepszone projekty. Niektóre z tych produktów wzbudziły zainteresowanie Marynarki Wojennej i przeszły odpowiednie testy.

Kontener transportowy z "Posejdonem". Zdjęcie Ministerstwa Obrony Federacji Rosyjskiej
„Sea Shadow” to urządzenie o długości 3 m ze „skrzydłami”, dzięki którym zapewniony jest ruch. Masa produktu wynosi 150 kg, z czego 15-17 kg to ładowność. Zamiast tradycyjnej elektrowni ze śmigłem zastosowano system zmiany pływalności. Z jego pomocą AUV manewruje w głąb, podczas gdy „skrzydła” zapewniają ruch translacyjny. Ta metoda poruszania się pozwala przyspieszyć tylko do 1,5-2 węzłów, ale zapewnia wysoką wydajność. Autonomia „Sea Shadow” przekracza 6 miesięcy.
próbki bojowe
Z wielu powodów współczesny projekt Poseidon zyskał największą popularność wśród wojskowych AUV. Istnienie takiego rozwoju stało się znane już w listopadzie 2015 roku, ale oficjalne ogłoszenie miało miejsce dopiero w marcu 2018 roku. Od tego czasu wielokrotnie zgłaszano różne testy, ale produkt nie został jeszcze oddany do użytku.
„Posejdon” to pojazd podwodny o długości do 20 m i wyporności ok. 100 t. Wykorzystywana jest elektrownia jądrowa, która daje niemal nieograniczoną autonomię i zasięg przelotowy. Na pokładzie AUV muszą znajdować się różne systemy nawigacji, sterowania itp., które zapewniają niezależne misje nawigacyjne i bojowe. Przewiduje się instalację głowicy jądrowej o nieznanej mocy.

Szacunkowy wygląd produktu "Cephalopod". Grafika Hisutton.com
Wiadomo, że Posejdony będą używane z okrętami podwodnymi-nośnikami. W tym charakterze rozważa się kilka atomowych okrętów podwodnych przebudowanych według specjalnych projektów. Najwyraźniej przewoźnik dostarczy pojazd podwodny w określony rejon, po czym będzie mógł samodzielnie patrolować lub udać się do wyznaczonego celu.
W 2015 roku okazało się, że Centralne Biuro Projektowe Rubin opracowuje projekt bojowego AUV pod kryptonimem Cephalopod. Poinformowano, że celem tego projektu jest stworzenie ciężkiego pojazdu zdolnego do przenoszenia broni torpedowej. Takie produkty powinny patrolować wody i wykrywać wrogie okręty podwodne - z ich późniejszą klęską na rozkaz.
Obecny status Projektu Głowonogów jest nieznany. Na poziomie oficjalnym nie wspomina się o tym od dość dawna, co można interpretować na różne sposoby. Być może projekt został porzucony z tego czy innego powodu lub jego ostateczne badanie odbywa się z zachowaniem wszelkiej niezbędnej tajemnicy.
Wygląd projektu aparatu-symulatora „Surrogat”. Grafika Centralnego Biura Projektowego „Rubin”
Z własnej inicjatywy Centralne Biuro Konstrukcyjne Rubin opracowało pojazd podwodny Surrogat. Jest to platforma modułowa z elektrownią, przeznaczona do ćwiczeń. Instalując odpowiednie moduły, Surrogat będzie mógł tworzyć fizyczne pola o niezbędnych parametrach i imitować okręty podwodne potencjalnego wroga.
Największe perspektywy ma kompleks Surogatów, ale jego przyszłość pozostaje niejasna. Ministerstwo Obrony nie wydało jeszcze swojej opinii na temat tego rozwoju sytuacji i nie mówiło o istnieniu planów przyjęcia takich środków na dostawy.
W interesie floty
Obecnie wiele krajowych organizacji zajmuje się rozwojem autonomicznych niezamieszkałych pojazdów podwodnych do różnych celów. Zaprezentowali już kilkanaście różnych projektów, z których część została zlecona Marynarce Wojennej lub jest jej oferowana. Ponadto kilka przedsiębiorstw organizuje lokalizację próbek zagranicznych. W rezultacie w ciągu ostatnich 12-15 lat udało się zamknąć przynajmniej na poziomie propozycji wszystkie główne nisze w dziedzinie AUV, a niektóre próbki pomyślnie doprowadzono do przyjęcia do dostaw i eksploatacji.
Prace nad tworzeniem nowych projektów trwają i już przynoszą pożądane rezultaty. Inne projekty są realizowane z myślą o odległej przyszłości, a ich postępy napawają optymizmem. W tym przypadku mówimy zarówno o technologii znanych już klas, jak i zasadniczo nowych próbkach. Tak więc rozwój nowego obiecującego obszaru trwa i ma już zauważalny wpływ na rozwój Marynarki Wojennej. A w przyszłości, dzięki nowym próbkom, ten wpływ znacząco wzrośnie.
informacja