MAI opracowuje nowy system sterowania dla autonomicznego RTK
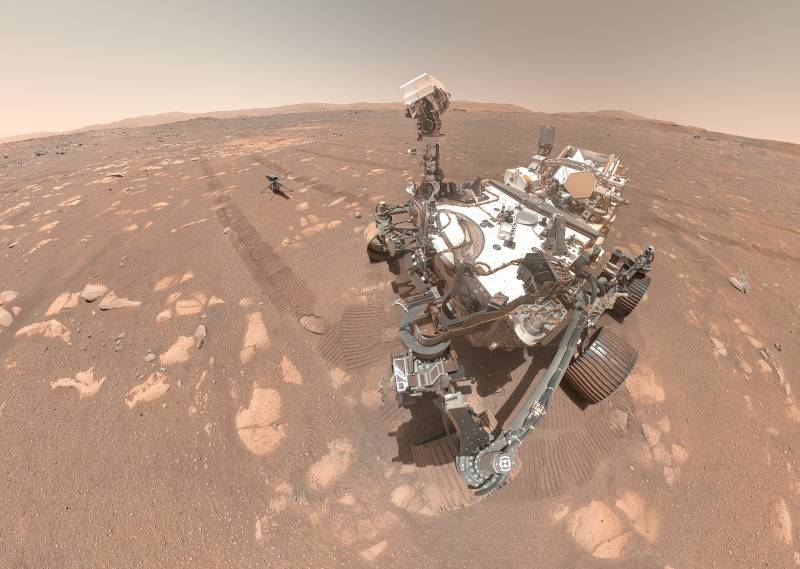
Przykładem zastosowania technologii SLAM jest łazik Perseverance. Zdjęcie NASA
Aby stworzyć obiecujące systemy robotyczne różnego rodzaju, wymagany jest szeroki wachlarz różnych technologii. Szczególne znaczenie w tym kontekście mają autonomiczne systemy sterowania, techniczne pomoce wizyjne itp. Systemy i technologie tego typu są opracowywane przez szereg krajowych organizacji, a do takich prac regularnie dołączają nowi uczestnicy. Tak więc niedawno okazało się, że inny podobny projekt jest opracowywany przez studentów Moskiewskiego Instytutu Lotniczego.
Obiecujący rozwój
Pod koniec grudnia serwis prasowy MAI poinformował o opracowaniu nowego, ciekawego projektu. Aleksey Koltovsky, student III roku w Instytucie Lotnictwa i Kosmonautyki nr 3 MAI, tworzy pakiet oprogramowania z funkcją autonomicznego sterowania robot. Rozwój tego projektu w przyszłości może posłużyć do stworzenia różnych systemów robotycznych, m.in. miejsce docelowe.
Powodem powstania projektu jest potrzeba pozbycia się charakterystycznych problemów i ograniczeń, z jakimi borykają się systemy kosmiczne. Tak więc sygnał radiowy z Ziemi na Marsa trwa około 15 minut i tyle samo czasu potrzeba na otrzymanie odpowiedzi. W związku z tym zdalne sterowanie łazikiem planetarnym lub innym sprzętem staje się praktycznie niemożliwe. Dodatkowo ocena sytuacji przez operatora jest utrudniona ze względu na słabą jakość przesyłanych zdjęć czy sygnału wideo.
Rozwiązaniem tych problemów, zgodnie z koncepcją A. Koltovsky'ego, powinien być pakiet oprogramowania z funkcją autonomicznej nawigacji i jazdy. Nowoczesny sprzęt i oprogramowanie pozwalają robotowi tworzyć trójwymiarową reprezentację otoczenia, a także samodzielnie podejmować decyzje i wyznaczać trasę.
Jak informowaliśmy, obecnie student-programista tworzy pakiet oprogramowania z niezbędnymi funkcjami i możliwościami. Planowany jest już kolejny etap projektu. Wiosną autor wraz ze współpracownikami przeprowadzą pierwsze testy. Wykorzystają samojezdną sześciokołową platformę, która zostanie wyposażona w sterowanie oparte na nowych algorytmach.

Eksperymentalny „Marker” RTK, przeznaczony do testowania nowych technologii. Zdjęcie FPI
A. Koltovsky zauważa, że jeśli się powiedzie, nowe narzędzia programowe i technologie z jego projektu mogą zostać wykorzystane do stworzenia różnych RTK do rozwiązywania szerokiego zakresu zadań. Sam deweloper koncentruje się przede wszystkim na sektorze kosmicznym – to właśnie pojazdy badawcze będą w stanie w pełni wykorzystać potencjał nowych technologii.
Autonomia i uproszczenie
Publikacja serwisu prasowego MAI opisuje ogólne zasady opracowanego systemu, jego możliwości i zalety. Generalnie mówimy o wykorzystaniu już znanych rozwiązań, ale z ich adaptacją i udoskonaleniem pod konkretne zadania praktyczne i zakres. W związku z tym proponuje się zmniejszenie zakresu używanych urządzeń i obejście się przy ich minimalnej liczbie.
W celu uproszczenia konstrukcji i oprogramowania proponuje się wykorzystanie wyłącznie środków optycznych do wizualnego badania terenu/trasy. Korzystanie z akcelerometrów lub innych urządzeń nie jest przewidziane. Zestaw kamer podłączony jest do komputera, który wykonuje niezbędne obliczenia i wydaje polecenia siłownikom.
Kompleks jako całość powinien działać w technologii „simultaneous location and mapping” (Simultaneous Localization And Mapping - SLAM). Komputer odbierze sygnał wideo z kamer i przetwarzając go sporządzi mapę terenu ze wszystkimi jego cechami, m.in. z przeszkodami. Na podstawie tych danych automatyzacja zbuduje trasę i zdecyduje, jak pokonać każdą przeszkodę.
Oprogramowanie dla zaawansowanego kompleksu jest napisane w języku Python. Ponadto autor wykorzystuje biblioteki uczenia maszynowego i widzenia maszynowego. Głównym zadaniem w tej chwili jest optymalizacja wykorzystywanych algorytmów i zbiorów danych w celu zmniejszenia wymaganej mocy obliczeniowej przy jednoczesnym zwiększeniu wydajności.
A. Koltovsky zauważa, że istniejąca biblioteka OpenCV w swojej pierwotnej postaci, bez optymalizacji, jest w stanie przetwarzać sygnał wideo z szybkością 0,82 klatki na sekundę. Optymalizacja algorytmów pozwala zwiększyć wydajność do 8-10 klatek na sekundę.

„Marker” na podwoziu kołowym. Zdjęcie FPI
Ogólnie rzecz biorąc, technologia SLAM ma duże perspektywy i już pokazała swoje możliwości w praktyce. Tak więc łazik Perseverance amerykańskiej agencji NASA wyznacza przeszkody, m.in. za pomocą środków optycznych. Obróbka zdjęć i filmów wraz z utworzeniem trójwymiarowych map terenu pozwoliła zwiększyć dopuszczalną prędkość z 20 m/h do 120 m/h – sześciokrotnie.
Należy zauważyć, że taki projekt jest unikalny dla rosyjskiej nauki. Zadania tworzenia systemów oprogramowania dla autonomicznych systemów sterowania opartych na SLAM i ich adaptacji do platform obliczeniowych o stosunkowo małej mocy w naszym kraju nie zostały jeszcze rozwiązane. Tak więc projekt studencki ma min historyczny oznaczający.
Na tle branży
W ostatnich latach w naszym kraju powstało wiele różnych naziemnych RTK o różnych funkcjach i możliwościach. Niektóre z tych systemów osiągnęły nawet praktyczne działanie w różnych strukturach i działach. W szczególności szeroko znane stały się roboty kilku typów dla wojska. Jednocześnie rozwój branży i rozwój nowych projektów nie ustają. Ponadto różne organizacje i pasjonaci tworzą bazę naukową i technologiczną dla kolejnych projektów.
Jednym z głównych zadań branży jest obecnie tworzenie autonomicznych systemów sterowania zdolnych do jazdy w różnych warunkach, poruszania się po określonej trasie czy samodzielnego pokonywania przeszkód. Aby rozwiązać takie problemy, stosuje się różne tak zwane urządzenia. wizja techniczna i komputery pokładowe ze specjalnym oprogramowaniem.
Standardowy zestaw czujników do samojezdnego naziemnego RTK obejmuje kamery i lidary, a także w niektórych przypadkach czujniki ultradźwiękowe lub radarowe. Wszystkie te urządzenia zbierają dane, które komputer łączy w trójwymiarową mapę terenu, nadającą się do orientacji. Dodatkowo do mapy terenu dodawane są dane z satelitów lub inercyjnych pomocy nawigacyjnych.
Ta metoda wyznaczania lokalizacji i opracowywania trasy już dawno pokazała i potwierdziła swój potencjał i możliwości. Wyróżnia się jednak pewną złożonością i wysokimi kosztami ze sprzętowego punktu widzenia - wykorzystuje dość złożone i drogie czujniki. Ponadto część instrumentalna gotowego RTK różni się w rezultacie znacznymi wymiarami i wagą.

Ciężka inżynieria RTK „Prohod-1” - podczas pracy część zadań jest rozwiązywana przez automatyzację. Foto VNII "Sygnał"
Nowy projekt MAI proponuje optymalizację procesów mapowania i późniejszej nawigacji na ziemi. Jego główną ideą jest rezygnacja ze wszystkich czujników z wyjątkiem kamer wideo przy jednoczesnym ulepszaniu używanego oprogramowania. Teoretycznie takie podejście jest całkiem korzystne pod względem technicznym i ekonomicznym, chociaż nowa technologia wymaga opracowania i przetestowania.
Projekt studenta MAI lub podobne opracowania innych autorów są interesujące w kontekście dalszego rozwoju RTK do różnych zadań. Zwiększenie autonomii robota podczas jazdy pozwala odciążyć operatora i zapewnić pomyślne przejście trasy.
Ponadto możliwe staje się tworzenie całkowicie autonomicznych systemów do pracy w trudnych warunkach, m.in. gdy nie można użyć sterowania radiowego. Twórca nowego systemu wskazuje, że przyda się to w eksploracji kosmosu. Jednak na Ziemi jest praca dla autonomicznych maszyn.
Powód do optymizmu
Projekt układu sterowania studenta MAI jest jeszcze w fazie rozwoju, ale już teraz spodziewane są testy z wykorzystaniem eksperymentalnej platformy naziemnej. Praktyczny test nowych technologii odbędzie się na wiosnę i wtedy okaże się, jak udany jest nowy projekt. Wtedy będzie można to ocenić i określić realną wartość dla branży.
Nie wiadomo, czy doświadczony RTK i jego system sterowania poradzą sobie z nadchodzącymi kontrolami. Jednak już teraz ten projekt pokazuje, że już teraz – dzięki postępowi i dostępności niezbędnych rozwiązań – nie tylko duże organizacje, ale także entuzjaści czy studenci mogą tworzyć obiecujące technologie. I całkiem możliwe, że takie projekty w przyszłości będą miały znaczący wpływ na rozwój całej branży.
informacja