Systemy sterowania statku kosmicznego „Buran”

System Energia-Buran na platformie startowej. Zdjęcie autorstwa NPO Molniya
15 listopada 1988 roku odbył się pierwszy i jedyny lot orbitalny radzieckiego statku kosmicznego wielokrotnego użytku Buran. Z pomocą rakiety nośnej Energia statek wszedł na orbitę, wykonał dwa okrążenia i wrócił na Ziemię, po wykonaniu poziomego lądowania na lotnisku. Lot był w pełni automatyczny przy użyciu unikalnych elementów sterujących na pokładzie.
Trudne zadania
Rozwój obiecującej rakiety wielokrotnego użytku i systemu transportu kosmicznego, który zaowocował pojawieniem się Burana, rozpoczął się w 1976 roku. Specjalnie utworzona NPO Molniya, kierowana przez Generalnego Projektanta G.E. Łozino-Łoziński. W projekt zaangażowało się także kilkadziesiąt innych organizacji naukowych i projektowych. Na przykład za opracowanie układu napędowego odpowiadało Biuro Projektowe Automatyki Chemicznej (Woroneż) i Instytut Badawczy Inżynierii Mechanicznej (Niżniaja Salda).
Uczestnicy programu musieli stworzyć optymalny obraz przyszłego statku, a także zrealizować go w formie pełnoprawnego projektu. Jednocześnie konieczne było rozwiązanie wielu problemów technicznych różnego rodzaju. Tak więc, zgodnie z zakresem zadań, przyszły Buran powinien był zostać obsadzony, ale planowano użyć autopilota o szerokich funkcjach. Statek miał mieć automatyczny tryb lotu, zniżania i lądowania.

„Buran” po pierwszym locie. Zdjęcie autorstwa NPO Molniya
Generalnie rozwój systemów sterowania podzielono na kilka głównych obszarów. Pierwszy dotyczył opracowania sterów i powiązanych systemów dla szybowca przeznaczonego do lotu w atmosferze. Drugim zadaniem było stworzenie kompleksu silników manewrowych do pracy w kosmosie. W ramach trzeciego kierunku opracowano elektronikę pokładową, narzędzia obliczeniowe i oprogramowanie do nich. Fundusze te miały zapewniać kontrolę nad działaniem innych systemów kontrolnych.
Projekt wszystkich systemów został ukończony w pierwszej połowie lat osiemdziesiątych. Umożliwiło to rozpoczęcie budowy samolotu analogowego BTS-002 do kolejnych testów w atmosferze. Ponadto rozpoczęto budowę pełnoprawnego statku kosmicznego.
Kontrola aerodynamiczna
„Buran” został zbudowany według schematu „bezogonowego” z nisko położonym skrzydłem delta, które miało zmienny kąt natarcia krawędzi natarcia. Na tylnej części kadłuba znajdował się kil. Przy tak aerodynamicznym kształcie samolot orbitalny mógł wykonywać lot szybowy w atmosferze, co było wymagane do regularnego lądowania.
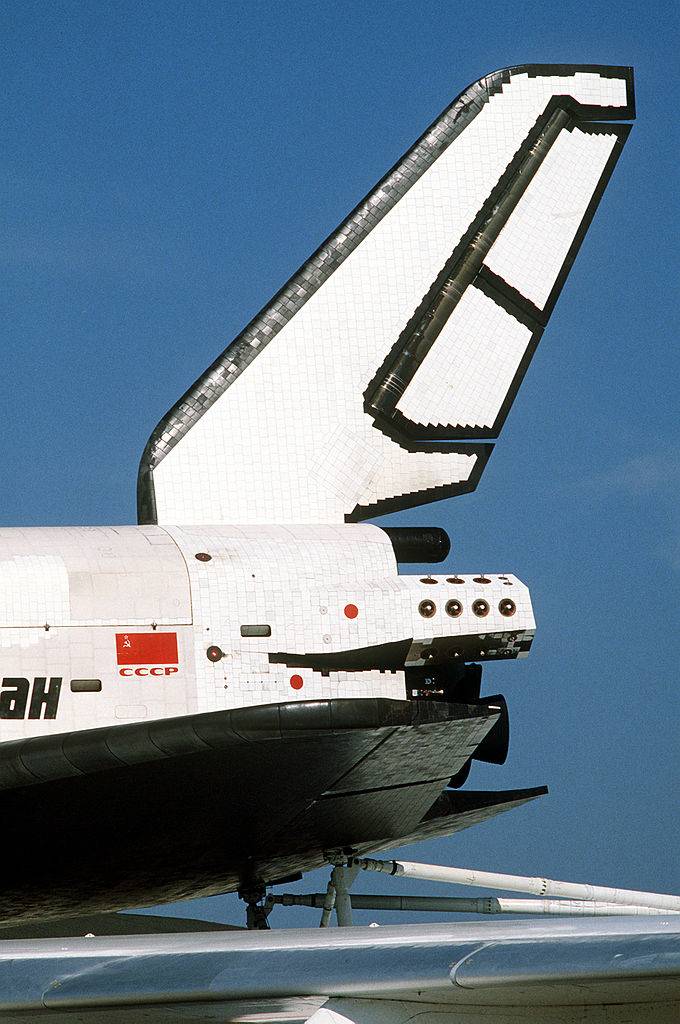
Ogon „Buran”. Wyraźnie widać stępkę ze sterem, bloki silnika sterującego i orientacyjnego, stery wysokości i tarczę wyważającą. Zdjęcie z Wikimedia Commons
Aby kontrolować lądowanie, „Buran” otrzymał dość proste i znane środki. Na krawędzi spływu skrzydła umieszczono wielkopowierzchniowe stery wysokości: ich synchroniczne lub różnicowe wychylenie umożliwiało kontrolę przechyłu i pochylenia. Pomiędzy sterami wysokości, na ogonie kadłuba od dołu, umieścili tzw. tarcza równoważąca. Z jego pomocą poprawiono sterowność przy prędkościach naddźwiękowych i hipersonicznych. Na stępce znajdował się ster. Składał się z dwóch symetrycznych pionowych części, które mogły rozchodzić się na boki i wykonywać zadania hamulca pneumatycznego.
Wszystkie powierzchnie sterujące były napędzane hydraulicznie. Aby poprawić niezawodność, Buran otrzymał trzy niezależne układy hydrauliczne z własnymi pompami, rurociągami itp. Siłowniki hydrauliczne odpowiedzialne za napędzanie sterów były zdalnie sterowane sygnałami elektrycznymi z głównych układów sterowania.
Kontrola w kosmosie
Za pracę, manewrowanie i orientację na orbicie Buran otrzymał tzw. zintegrowany układ napędowy (APU). Zawierał dwa silniki podtrzymujące o ciągu 90 kN każdy w ogonie. Statek otrzymał również 38 silników sterujących i 8 silników precyzyjnej orientacji. Jednostki te umieszczono w przednim kadłubie z dyszami na górze i po bokach oraz w dwóch charakterystycznych osłonach ogona.
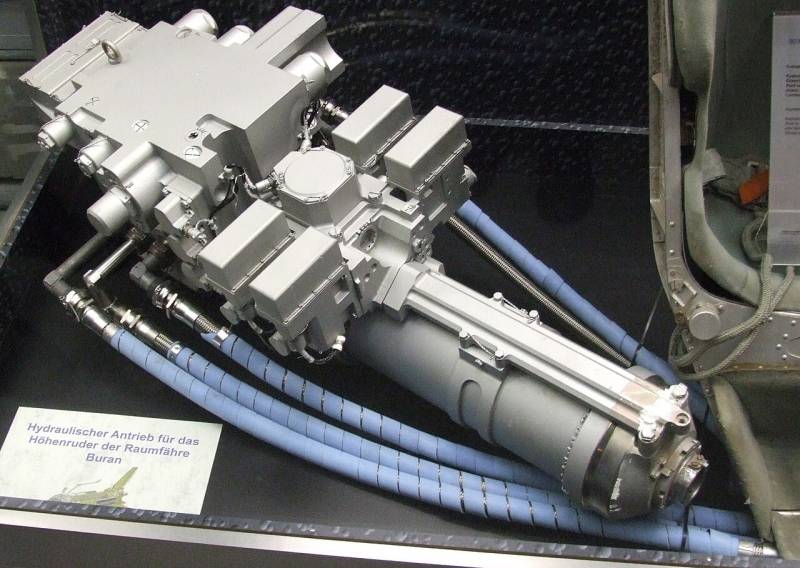
Napęd hydrauliczny jednego z sterów aerodynamicznych. Zdjęcie z Wikimedia Commons
Główną pracę na orbicie powierzono silnikom sterującym typu 17D15. Znajdowały się one w różnych częściach płatowca i były skierowane w różnych kierunkach. Włączając niektóre silniki na wymagany czas, załoga lub autopilot musieli zmienić orientację statku. Ponadto silniki sterujące mogą powielać silniki marszowe, ale ze stratą wydajności.
Produkt 17D15 był gazowo-cieczowym silnikiem rakietowym zasilanym paliwem węglowodorowym i tlenem. Ciąg jednego takiego produktu osiągnął 4 kN przy określonym impulsie do 290-295 sek. Podczas lotu silnik mógł włączyć się nawet 2 tysiące razy. Całkowity zasób to 26 tysięcy inkluzji.
Silnik orientacyjny był podobny w konstrukcji do silnika sterującego, ale różnił się mniejszymi wymiarami i innymi cechami. Jego ciąg osiągnął zaledwie 200 N przy impulsie właściwym 265 sekund. Jednocześnie dopuszczano 5 tysięcy inkluzji na lot. Dzięki mniejszemu ciągowi zapewniono dokładniejszą orientację statku w przestrzeni, wystarczającą do wykonania niektórych prac.
Kontrola ODE odbywała się centralnie za pomocą odpowiednich instrumentów. Praca instalacji była kontrolowana przez załogę i/lub automatykę, w zależności od wykonywanych czynności i zadań.

Kokpit symulatora załogi. Zdjęcie z Wikimedia Commons
Kompleks komputerowy
Dla Burana stworzono najbardziej złożony system sterowania, który zapewnia loty we wszystkich trybach i rozwiązywanie zadań pomocniczych, realizację działań naukowych lub praktycznych itp. Obejmowało ponad 1250 różnych urządzeń i urządzeń, cyfrowe narzędzia obliczeniowe, a także liczne trasy kablowe itp. Różne urządzenia z systemu sterowania zostały rozmieszczone niemal w całym płatowcu statku.
Podstawą systemu sterowania był pokładowy centralny zespół komputerowy (OCCC), podzielony na dwa systemy, centralny i peryferyjny. Każdy taki system zbudowany był w oparciu o dwa komputery BISER-4. Taka architektura cyfrowego komputera pokładowego zapewniała wysoką niezawodność i odporność na awarie całego kompleksu. Produkt BISER-4 opracowany przez NPTsAP im. Akademik Pilyugin był maszyną 32-bitową z wydajnością procesora 37x104 op./sek. Pobór mocy - 270 W, waga - 34 kg.
BTsVK zbierało i przetwarzało dane z różnych czujników, narzędzi i systemów. Odpowiadał za nawigację w kosmosie i atmosferze, kontrolował stan podzespołów i podzespołów, wymieniał dane z urządzeniami naziemnymi kompleksu itp. Kompleks kontrolował również działanie sterów aerodynamicznych i ODU. W ręcznym trybie sterowania lotem BTsVK miał zamienić działania załogi na polecenia dla siłowników. Tryb automatyczny zapewnia całkowicie samodzielną pracę.
Dla BTsVK stworzono oryginalne oprogramowanie w postaci systemu operacyjnego i zestawu dodatkowych programów. Łączna ilość oprogramowania była jak na tamte czasy niezrównana - ok. 100MB.
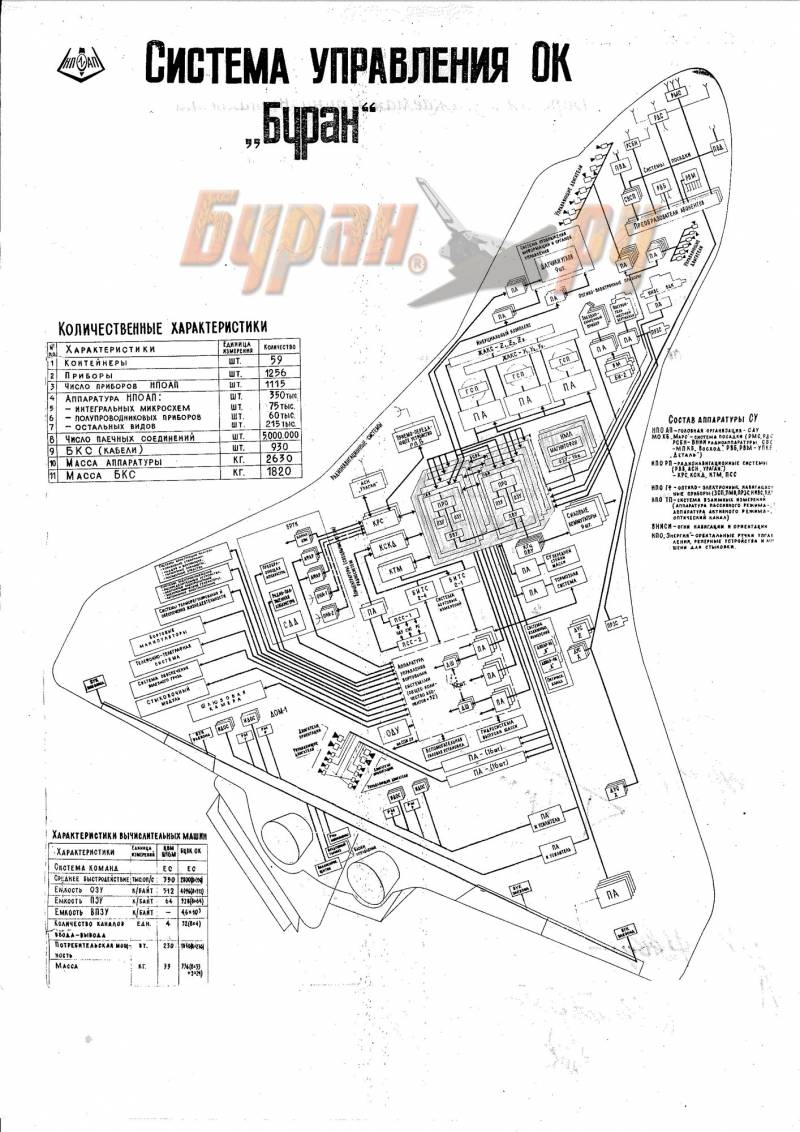
Schemat ideowy układów sterowania. Grafika Buran.ru
Kompleks oprogramowania zapewniał działanie sprzętu, interakcję pokładowego komputera cyfrowego z różnymi urządzeniami itp. Między innymi zaimplementował algorytmy automatycznego sterowania lotem we wszystkich trybach. Szczególnie interesująca jest możliwość automatycznego zejścia z orbity, lotu w atmosferze i lądowania na określonym lotnisku. Ciekawe, że pierwotnie zapewniono tylko tryb automatycznego lądowania. Instrukcja dodana później pod naciskiem klienta.
Sprawdzone w praktyce
W 1984 roku NPO Molniya, przy pomocy innych uczestników projektu Buran, zbudowała analogowy samolot BTS-002, znany również jako OK-GLI lub „0.02”. Była to kopia samolotu orbitalnego, przystosowana do poziomego startu i lotu w atmosferze. BTS-02 prawie całkowicie powtórzył projekt Burana i miał wszystkie niezbędne elementy sterujące, system komputerowy itp. W tym samym czasie został wyposażony w silniki turboodrzutowe.
10 listopada 1985 roku kosmonauci Igor Volk i Rimantas Stankevičius po raz pierwszy wznieśli BTS-002 w powietrze. W czerwcu następnego roku, podczas czwartego lotu, po raz pierwszy przetestowano półautomatyczne planowanie - piloci zachowali kontrolę nad samolotem, ale część zadań została przekazana automatyzacji. Pod koniec 1985 roku przeprowadzono eksperymenty z automatycznym lotem na lotnisko; sterowanie ręczne zostało włączone dopiero przed dotknięciem. Wreszcie, 16 lutego 1987 roku, w dziesiątym locie, BTS-002 po raz pierwszy samodzielnie wylądował. Do wiosny 1988 roku wykonano kilkanaście podobnych lotów w celu przetestowania systemów i algorytmów.

Żyroskopowe urządzenie do nawigacji bezwładnościowej Sh300 (na pierwszym planie), stworzone dla Burana. Zdjęcie z Wikimedia Commons
Wreszcie 15 listopada 1988 roku odbył się pierwszy i jedyny lot kosmiczny orbitalnego Burana. Po dwóch okrążeniach planety statek automatycznie zniżył się i wylądował na lotnisku Bajkonur. Na etapie lądowania BTsVK otrzymał dane o warunkach pogodowych na lotnisku z obiektów naziemnych, prawidłowo je ocenił i wykonał nieoczekiwany manewr. „Buran” samodzielnie zbudował optymalne podejście i wykonał lądowanie pod wiatr.
Technologie przeszłości
Niestety, pierwszy lot kosmiczny Burana pozostał jedynym. W przyszłości, z wielu powodów, których większości w żaden sposób nie można nazwać obiektywnymi, program Energia-Buran został ograniczony, a dalsze prace nie zostały wznowione. Orbitalne, atmosferyczne i inne próbki statku trafiły na wieczny parking, a niektóre miały szczęście stać się eksponatem muzealnym.
Jednak nawet przy takim wyniku śmiały i obiecujący program Buran pokazał swój potencjał. Przemysł radziecki wykazał swoją zdolność do opracowania takiego sprzętu i doprowadzenia go przynajmniej do testów. Korzystając z dostępnych i nowo opracowanych technologii i komponentów, nasze przedsiębiorstwa były w stanie stworzyć system kosmiczny o unikalnych możliwościach.
Jednak w przyszłości doświadczenia projektu Buran, m.in. w kontekście systemów kontroli, jako całość pozostały nieodebrane. W pierwszych latach lub dekadach po jedynym uruchomieniu Energia-Buran branża nie miała możliwości pełnego rozwoju tego kierunku. Potem pojawiły się nowe technologie i bardziej zaawansowana baza pierwiastków o znacznie większym potencjale.
informacja