Ewolucja systemów sterowania wczesnych sowieckich statków kosmicznych

Model „Sputnika-1” z demonstracją urządzeń wewnętrznych. Zdjęcie Muzeum Kosmonautyki
Trudno sobie wyobrazić nowoczesny statek kosmiczny, jednorazowy lub wielokrotnego użytku, krajowy lub zagraniczny, bez złożonego systemu sterowania zbudowanego w oparciu o komputery o dużej wydajności. Jednak nie zawsze tak było. Wczesne sowieckie statki kosmiczne w ogóle nie miały żadnych systemów sterowania. Wtedy na urządzeniach pojawiły się pierwsze proste urządzenia, a ich dalsza ewolucja doprowadziła do powstania pełnoprawnych komputerów wielofunkcyjnych.
Po z góry ustalonej ścieżce
Krajowe i zagraniczne sondy i urządzenia używane we wczesnych eksperymentach i badaniach w dziedzinie technologii rakietowej i kosmicznej nie miały pełnoprawnych systemów sterowania. Na pokładzie znajdowały się urządzenia automatyki dla poszczególnych jednostek i systemów, ale nie przewidziano możliwości pełnego sterowania lotem. Co więcej, w tamtym czasie nie było ich potrzeby.
Na przykład pierwszy sztuczny satelita Ziemi SP-1 (Sputnik-1), wystrzelony w październiku 1957 r., miał na pokładzie akumulator, nadajnik radiowy, zestaw czujników i urządzenia chłodzące. Nie było urządzeń do określania współrzędnych i pozycji w przestrzeni, a także sterowania lotem. Satelita miał poruszać się po trajektorii wyznaczonej podczas startu.

Model „Sputnika-2”. W dolnej skrzyni znajdowała się „kabina” z miejscem dla psa. Zdjęcie z Wikimedia Commons
Na podobnej zasadzie zbudowano kolejny Sputnik-2, którego ładunkiem był kontener z psem Łajką. Na pokładzie znajdowały się jedynie przyrządy do zbierania i przekazywania danych o stanie zwierzęcia. Przewidziano jednak również automatyzację niektórych procesów, takich jak chłodzenie kontenera mieszkalnego.
Zdalne sterowanie
Już na etapie wstępnych badań stało się jasne, że obiecująca technologia kosmiczna powinna mieć pewne środki kontroli. Niezależnie lub na rozkaz z Ziemi satelity muszą włączać instrumenty, prowadzić badania i tak dalej. Takie problemy konstrukcyjne zostały rozwiązane już na początku 1958 roku przy tworzeniu kolejnego statku kosmicznego.
W maju 1958 roku na orbitę wszedł Sputnik-3, czyli obiekt D. Po raz pierwszy w praktyce domowej urządzenie to otrzymało środki automatycznego i zdalnego sterowania. Kompleks oprzyrządowania pokładowego mógł odbierać i wykonywać polecenia z naziemnej stacji kontroli. Na pokładzie znajdowało się 12 instrumentów naukowych do różnych celów, które były włączane i wyłączane na polecenie lub przez pokładowe urządzenie programujące czas. Dodatkowo w niektórych częściach orbity, gdzie nie było połączenia z Ziemią, automatycznie włączał się zapis telemetrii na taśmie magnetycznej. Po przywróceniu połączenia nagrane informacje zostały przesłane.
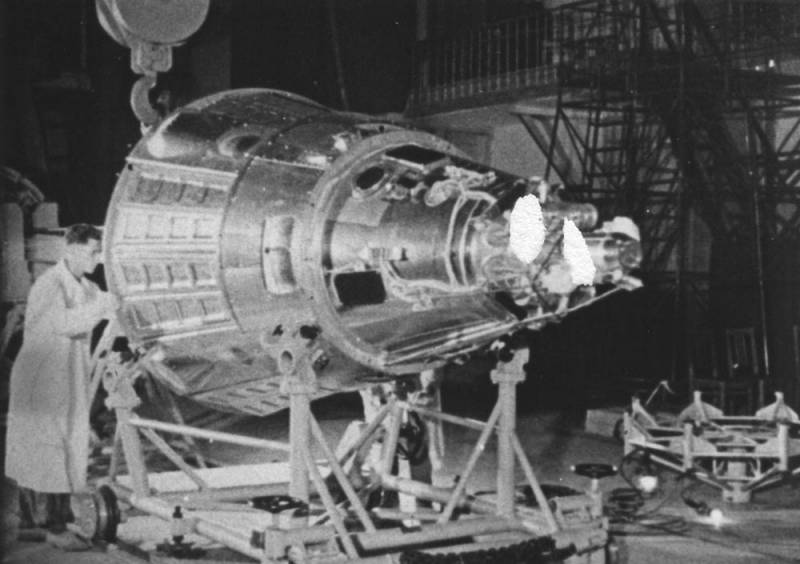
„Sputnik-3” / „D” na etapie montażu. Zdjęcie autorstwa RGANTD
Wkrótce w dziedzinie badań międzyplanetarnych zastosowano zdalne sterowanie radiowe. Od jesieni 1958 roku ZSRR podejmował kilka prób wysłania automatycznych stacji międzyplanetarnych na Księżyc. Pierwsze starty zakończyły się wypadkami i dopiero w styczniu 1959 roku Luna-1 AMS była w stanie zbliżyć się do naturalnego satelity Ziemi. We wrześniu tego samego roku sonda Luna-2 po raz pierwszy wylądowała na Księżycu - twardo, ze zniszczeniem konstrukcji.
Na pokładzie wczesnych produktów Luny znajdował się zestaw przyrządów pomiarowych o różnym przeznaczeniu, urządzenia do monitorowania ich pracy, a także radiostacja do odbierania poleceń i nadawania telemetrii. Do lotu na Księżyc zainstalowano stacje na tzw. blok „E” - trzeci stopień rakiety nośnej „Wostok-L” z możliwością zdalnego sterowania. Jednostka była odpowiedzialna za sprowadzenie AMS na obliczoną trajektorię.
Po wystrzeleniu lot rakiety Wostok-L z Łuną był śledzony z ziemi przez sprzęt radarowy, pierwotnie stworzony do testowania pocisków balistycznych. Dane o trajektorii były odbierane i przetwarzane przez specjalny system komputerowy oparty na maszynie BESM-2. Kiedy produkt „E” z „Księżycem” zboczył z optymalnej trajektorii, kompleks utworzył się i przekazał mu polecenia, aby skorygować trajektorię. Ogólnie taki system działał dobrze, chociaż zdarzały się błędy.
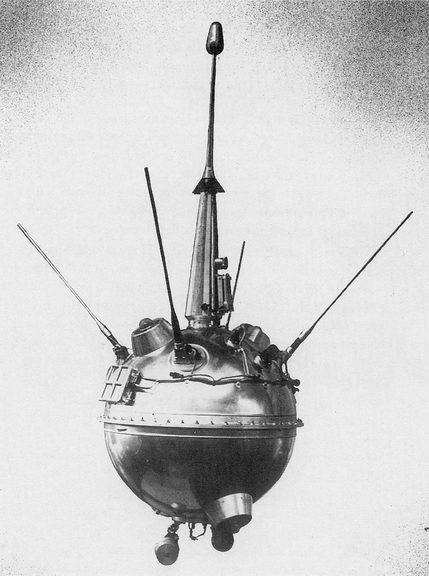
Stacja automatyczna „Luna-2”. Zdjęcie z Wikimedia Commons
Nowe funkcje
Wczesne statki kosmiczne mogły latać tylko po wcześniej obliczonej trajektorii, która została wystrzelona przez rakietę nośną lub górny stopień. Dla dalszego rozwoju programów kosmicznych konieczne było opracowanie niektórych narzędzi kontrolnych, które pozwoliłyby na orientację aparatury w przestrzeni i wykonywanie manewrów.
Pierwsze sukcesy w tym kierunku uzyskano podczas prac nad satelitą Luna-3 AMS, który z powodzeniem wystrzelono w październiku 1959 roku. Dla tej stacji stworzono autorski fototelemetryczny system orientacji Chaika. Zawierał elementy optyczne, które określały położenie Słońca i Księżyca względem AMS, urządzenie obliczeniowe i silniki manewrowe. Sprzęt naukowy stacji, jak poprzednio, pracował zgodnie z ustalonym programem lub poleceniami z centrum sterowania.
To właśnie obecność systemu „Chaika” pozwoliła „Lunie-3” sfotografować naturalnego satelitę Ziemi, m.in. jego odwrotna strona. W przyszłości rozwój tego systemu i jego główne idee były aktywnie wykorzystywane w innych projektach technologii kosmicznej.
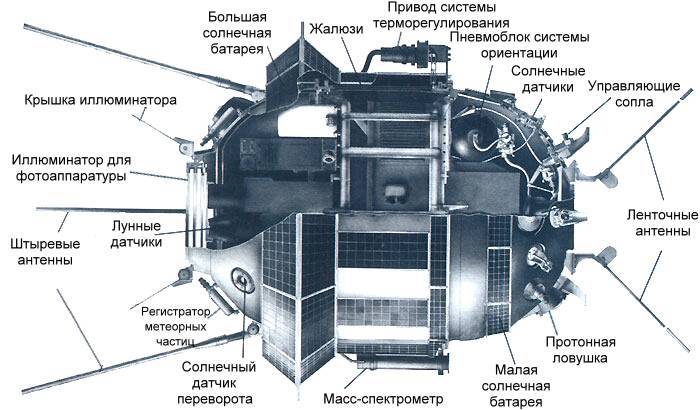
„Luna-3” z systemem orientacji „Mewa”. Grafika Astronaut.ru
Autonomiczna kontrola
Od 1957 roku trwają prace nad obiecującym załogowym statkiem kosmicznym, nazwany później Wostok. Otrzymał automatyczne i ręczne systemy sterowania, które się powielały. Wszystkie środki wyróżniały się pewną prostotą i odpowiadały zadanym zadaniom. Tak więc sprzęt umożliwił orientację na orbicie i wykonanie zejścia. Inne funkcje były praktycznie nieobecne. Do orientacji w kosmosie statek miał zestaw silników małej mocy sterowanych przez automatykę lub astronautę.
Wyrównanie poziome przeprowadzono za pomocą czujników podczerwieni. Wzdłuż osi orbity statek był prowadzony przez Słońce (automatycznie) lub przez Ziemię za pomocą urządzenia Vzor (ręcznie). Samodzielnie lub na polecenie automatyzacja mogłaby wykonać zejście z orbity za pomocą hamującego układu napędowego. Kosmonauta został poproszony o wykonanie tych zadań za pomocą urządzenia nawigacyjnego Globus, które obliczyło przybliżony obszar lądowania.
W maju 1960 roku miał miejsce pierwszy start eksperymentalnego Wostoka w konfiguracji bezzałogowej. Urządzenie pod oznaczeniem „Sputnik-4” nie mogło wrócić na Ziemię z powodu awarii systemu orientacji. Potem odbyło się jeszcze kilka startów, m.in. z ładunkiem w postaci sprzętu naukowego, zwierząt i manekinów. Na przykład 19 sierpnia 1960 roku słynna Belka i Strelka polecieli w kosmos. Z oczywistych względów w lotach tych wykorzystywano wyłącznie automatyczne i zdalne sterowanie.

Tablica przyrządów załogowego statku kosmicznego „Wostok”. Zdjęcie z Wikimedia Commons
Wreszcie 12 kwietnia 1961 roku odbył się pierwszy lot Wostoka w konfiguracji załogowej. Pod kontrolą pierwszego na świecie pilota-kosmonauty Yu.A. Statek Gagarina wykonał jedną orbitę i pomyślnie wrócił na Ziemię. W ciągu następnych dwóch lat miało miejsce jeszcze pięć startów statku kosmicznego Wostok z astronautami i duża liczba testów bezzałogowych. Wszystkie te działania potwierdziły sprawność nowych systemów sterowania.
Komputer pokładowy
Już podczas opracowywania statku kosmicznego Luna czy Wostok radzieccy specjaliści pracowali nad dalszymi sposobami rozwoju systemów sterowania dla statków kosmicznych i AMS. Tak więc pod koniec lat pięćdziesiątych rozpoczęto badania nad wysłaniem statku kosmicznego na Marsa. Początkowo prace były prowadzone w ramach programu 1M.
Wykorzystanie sterowania radiowego w takim programie było praktycznie wykluczone. Oddzielne zautomatyzowane narzędzia, podobnie jak w poprzednich projektach, również miały swoje wady. W związku z tym postanowiono stworzyć tzw. jednostkę obliczeniową opartą na centralnym komputerze pokładowym, do którego podłączone byłyby wszystkie pozostałe systemy AMS. Zadanie stworzenia SRB zostało zresztą pomyślnie rozwiązane dzięki wprowadzeniu nowych rozwiązań i nowoczesnej bazy komponentów. Tak naprawdę chodziło o jeden komputer pokładowy, który wykonuje wszystkie zadania podczas lotu.
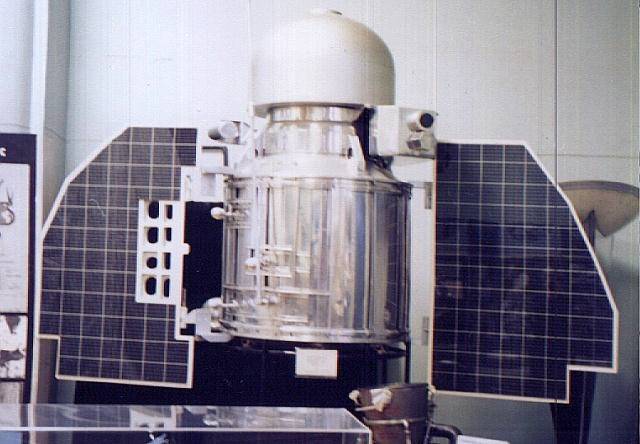
AMS „Mars-1960” z pełnoprawnym komputerem pokładowym. Zdjęcie z Wikimedia Commons
W ramach programu 1M zbudowano dwie stacje Mars-1960. Musieli automatycznie latać w pobliżu Marsa, zbierać dane naukowe i przesyłać je na Ziemię. Start obu AMS miał miejsce w październiku 1960 roku i oba starty zakończyły się wypadkami – stacje wypaliły się w atmosferze. Nie było możliwości przetestowania SRB w locie.
Jednak rozwój idei SRB nie zniknął. Wkrótce rozpoczął się rozwój „ciężkiego statku międzyplanetarnego” TMK, który również postanowiono wyposażyć w jeden kompleks komputerowy. Projekt ten nie zakończył się sukcesem, ale jego twórcom udało się ponownie posunąć do przodu w tworzeniu komputerów dla kosmosu.
Ostatecznie w ramach prac TMK powstała i dopracowana została koncepcja jednego komputera pokładowego odpowiedzialnego za wszystkie operacje i wspomagającego załogę. Wkrótce ta koncepcja została wykorzystana do stworzenia załogowego statku kosmicznego Sojuz, stacji orbitalnych Salut i wielu innych projektów.
Jeden z bloków wczesnego komputera pokładowego statku kosmicznego Sojuz. Zdjęcie habr.com
procesy ewolucyjne
W latach pięćdziesiątych i sześćdziesiątych rozwój rakiety i sfery kosmicznej przebiegał w szybkim tempie. Kluczowe wydarzenia, które zadecydowały o dalszym rozwoju kosmonautyki, miały miejsce z godną pozazdroszczenia regularnością i często dzieliło je kilka miesięcy. Jednocześnie w przemyśle zatrudniona była duża liczba przedsiębiorstw i specjalistów z różnych dziedzin, co przyczyniło się do szybkiego rozwiązania problemów.
Tendencje te dobrze ilustruje ewolucja systemów sterowania w statkach kosmicznych i statkach. Tak więc w 1957 roku Sputnik-1 wszedł na orbitę bez żadnych środków kontroli, a już w 1960 roku wyprodukowano i uruchomiono AMS z wielofunkcyjnym komputerem pokładowym. W tym samym czasie ukształtowały się główne idee i koncepcje, które są nadal stosowane w astronautyce – ale już na współczesnym poziomie technicznym.
informacja