Teoria i praktyka naziemnych mobilnych systemów robotycznych

Rozwój nowych doktryn operacyjnych, zwłaszcza dla działań wojennych w miastach i konfliktów asymetrycznych, będzie wymagał nowych systemów i środków technicznych, które zmniejszą straty wśród personelu wojskowego i cywilów. Można to osiągnąć dzięki rozwojowi w dziedzinie SMRK, wykorzystaniu zaawansowanych technologii nadzoru i gromadzenia informacji, a także rozpoznaniu i wykrywaniu celów, ochronie i precyzyjnym uderzeniu. SMRK, podobnie jak ich latające odpowiedniki, ze względu na powszechne stosowanie najnowocześniejszych technologii robotycznych, nie mają na pokładzie człowieka operatora.
Systemy te są również absolutnie niezbędne do pracy w zainfekowanym środowisku lub wykonywania innych „głupich, brudnych i niebezpiecznych” zadań. Konieczność opracowania zaawansowanych SMR wiąże się z koniecznością wykorzystania systemów bezzałogowych do bezpośredniego wsparcia na polu walki. Według niektórych ekspertów wojskowych niezamieszkałe pojazdy, których poziom autonomii będzie stopniowo wzrastał, staną się jednym z najważniejszych elementów taktycznych w strukturze współczesnych sił lądowych.

Zrobotyzowany kompleks oparty na samochodzie pancernym TERRAMAX M-ATV prowadzi kolumnę bezzałogowych pojazdów
Potrzeby operacyjne i rozwój SMRK
Pod koniec 2003 roku Centralne Dowództwo Stanów Zjednoczonych wydało pilne, pilne wnioski dotyczące systemów przeciwdziałających zagrożeniu improwizowanymi ładunkami wybuchowymi (IED). Organizacja JGRE (Joint Ground Robotics Enterprise) zajmująca się naziemnymi systemami robotyki opracowała plan, który może szybko zapewnić znaczny wzrost możliwości dzięki zastosowaniu małych zrobotyzowanych maszyn. Z biegiem czasu technologie te ewoluowały, wdrożono więcej systemów, a użytkownicy otrzymali zaawansowane prototypy do oceny. W efekcie wzrosła liczba personelu wojskowego i jednostek zajmujących się bezpieczeństwem wewnętrznym, które nauczyły się obsługiwać zaawansowane systemy robotyki.
Agencja Zaawansowanych Projektów Badawczych DARPA Defense prowadzi obecnie badania nad technologiami robotycznymi w zakresie uczenia maszynowego, w oparciu o swoje osiągnięcia w dziedzinie sztucznej inteligencji, a także rozpoznawanie powstałych obrazów. Wszystkie te technologie, opracowane w ramach programu UPI (Unmanned Perception Integration), są w stanie zapewnić lepsze zrozumienie otoczenia/terenu przez pojazd o dobrej mobilności. Efektem tych badań była maszyna o nazwie CRUSHER, której ocena operacyjna rozpoczęła się w 2009 roku; od tego czasu powstało kilka kolejnych prototypów.
Program MPRS (Man-Portable Robotic System) koncentruje się obecnie na rozwijaniu autonomicznych systemów nawigacji i unikania kolizji dla małych roboty. Definiuje również, bada i optymalizuje technologie mające na celu zwiększenie poziomu autonomii i funkcjonalności systemów robotycznych. Program RACS (Robotic for Agile Combat Support) rozwija różne technologie robotyczne, aby sprostać obecnym zagrożeniom i wymaganiom operacyjnym, a także przyszłym potrzebom i możliwościom. Program RACS rozwija i integruje również technologie automatyzacji dla różnych misji bojowych i różnych platform w oparciu o koncepcję wspólnej architektury i takich podstawowych cech, jak mobilność, prędkość, sterowanie i interakcja kilku pojazdów.
Udział robotów we współczesnych działaniach bojowych pozwala siłom zbrojnym zdobyć bezcenne doświadczenie w ich działaniu. Pojawiło się kilka interesujących kierunków dotyczących wykorzystania bezzałogowych statków powietrznych (UAV) i SMRK w tym samym teatrze operacyjnym, a planiści wojskowi zamierzają je dokładnie przestudiować, w tym ogólne zarządzanie kilkoma platformami, rozwój wymiennych systemów powietrznych, które mogą być instalowane zarówno na UAV, jak i na SMRK w celu rozszerzenia globalnych zdolności, a także nowych technologii dla zaawansowanych systemów bojowych.
W ramach programu pilotażowego ARCD (Active Range Clearance Developments) zostanie opracowany scenariusz tzw. „automatycznej ochrony strefy”, w którym kilka RMS będzie współpracować z kilkoma UAV. Ponadto zostanie dokonana ocena rozwiązań technologicznych w zakresie wykorzystania stacji radiolokacyjnych na platformach bezzałogowych, ocena integracji systemów dowodzenia i kierowania oraz ogólnej skuteczności systemów. W ramach programu ARCD Siły Powietrzne USA zamierzają opracować technologie niezbędne do poprawy skuteczności wspólnych działań SMRK i UAV (zarówno obwody samolotów, jak i śmigłowców), a także algorytmy „płynnej” pracy czujniki wszystkich zaangażowanych platform, wymiana danych nawigacyjnych i danych dotyczących niektórych przeszkód.
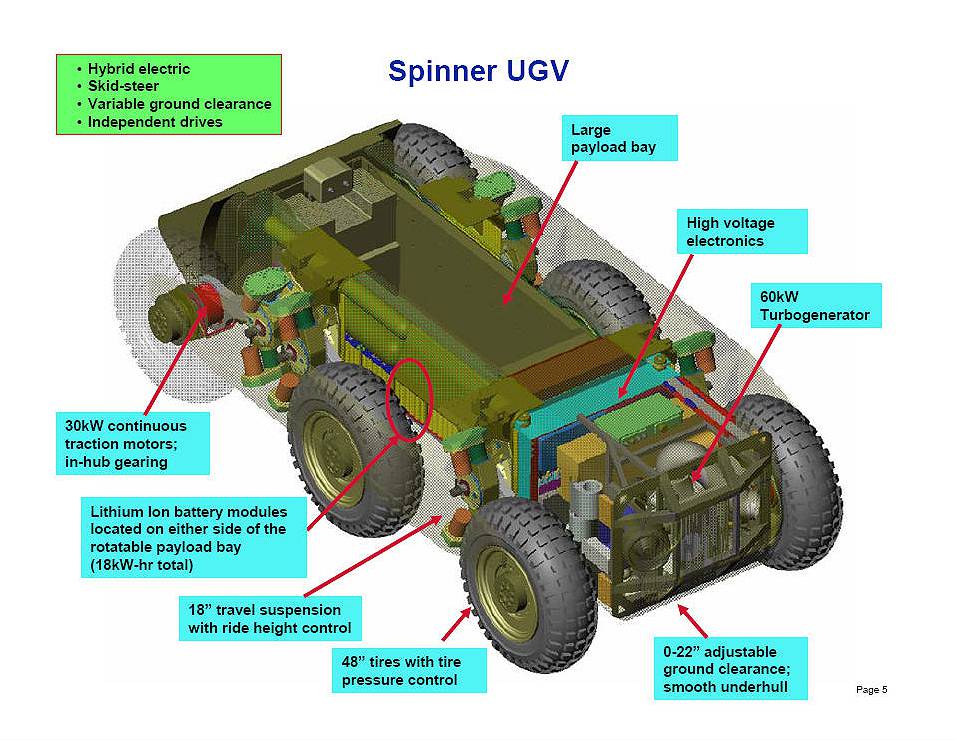
Wewnętrzny układ elementów mechanicznych, elektrycznych i elektronicznych SPINNER SMRK
Laboratorium Badawcze Armii Stanów Zjednoczonych ARL (Army Research Laboratory) przeprowadza eksperymenty w ramach swoich programów badawczych w celu oceny dojrzałości technologii. Na przykład ARL prowadzi eksperymenty, które oceniają zdolność w pełni autonomicznego SMRK do wykrywania i unikania poruszających się pojazdów i poruszających się ludzi. Ponadto Centrum Systemów Broni Kosmicznej i Morskiej Amerykanów flota prowadzi badania nad nowymi technologiami robotycznymi i powiązanymi kluczowymi rozwiązaniami technicznymi, w tym autonomicznym mapowaniem, unikaniem przeszkód, zaawansowanymi systemami komunikacji oraz wspólnymi misjami SMRK i UAV.
Wszystkie te eksperymenty, z udziałem wielu platform naziemnych i powietrznych jednocześnie, są prowadzone w realistycznych środowiskach, charakteryzujących się złożonym terenem i zestawem realistycznych zadań, podczas których oceniane są możliwości wszystkich komponentów i systemów. W ramach tych programów pilotażowych (i powiązanej strategii technologicznej) w rozwoju zaawansowanych SMRK zidentyfikowano następujące obszary w celu maksymalizacji zwrotu z przyszłych inwestycji:
- rozwój technologii zapewni bazę technologiczną dla podsystemów i komponentów oraz odpowiednią integrację z prototypami SMRK w celu testowania wydajności;
- wiodące firmy w tej dziedzinie opracują zaawansowane technologie niezbędne do rozszerzenia zakresu robotyzacji, np. poprzez zwiększenie rezerwy mocy SMRK oraz zwiększenie zasięgu kanałów komunikacyjnych; oraz
- Program ograniczania ryzyka zapewni, że zaawansowane technologie zostaną przetestowane pod kątem konkretnego systemu i przezwyciężą niektóre problemy technologiczne.
Dzięki rozwojowi tych technologii, SMRK są potencjalnie w stanie zapewnić rewolucyjny krok naprzód w sferze wojskowej, ich użycie zmniejszy straty ludzkie i zwiększy skuteczność bojową. Jednak aby to osiągnąć, muszą umieć pracować samodzielnie, w tym wykonywać złożone zadania.


Przykład uzbrojonego SMRK. AVANTGUARD izraelska firma G-NIUS Bezzałogowe Systemy Naziemne

Zaawansowany modułowy system robotyczny MAARS (Modular Advanced Armed Robotic System), uzbrojony w karabin maszynowy i granatniki
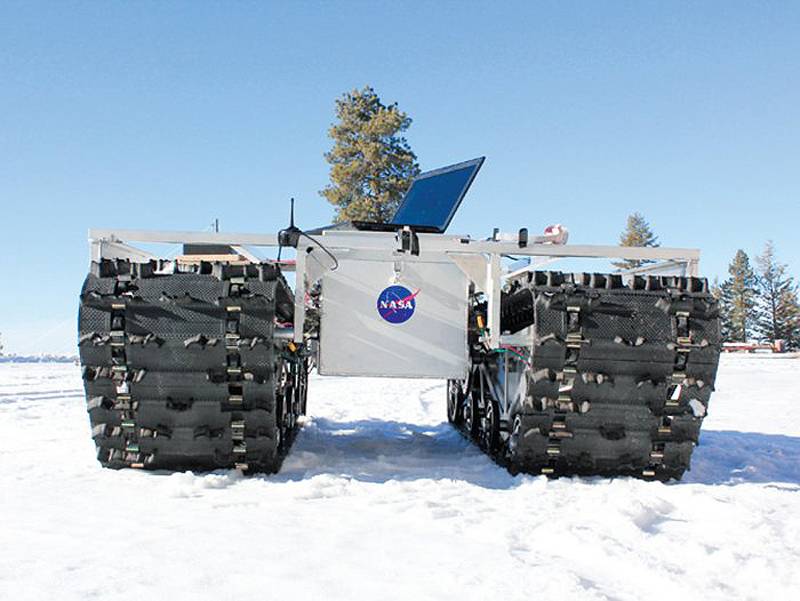
GROVER SMRK zaprojektowany przez NASA w zaśnieżonym terenie
Wymagania techniczne dla zaawansowanych SMRK
Zaawansowane SMR zostały zaprojektowane i opracowane z myślą o misjach wojskowych i działają głównie w niebezpiecznych środowiskach. Obecnie w wielu krajach prowadzone są prace badawczo-rozwojowe w dziedzinie zrobotyzowanych systemów bezzałogowych, które w większości przypadków mogą działać w trudnym terenie. Nowoczesne SMRK mogą przesyłać do operatora sygnały wideo, informacje o przeszkodach, celach i innych zmiennych o znaczeniu taktycznym lub w przypadku najbardziej zaawansowanych systemów podejmować całkowicie niezależne decyzje. W rzeczywistości systemy te mogą być półautonomiczne, wykorzystując dane nawigacyjne wraz z danymi z czujników pokładowych i zdalnymi poleceniami operatora w celu określenia trasy. W pełni autonomiczny pojazd wyznacza własny kurs, wykorzystując jedynie czujniki pokładowe do generowania trasy, ale operator zawsze ma możliwość podjęcia niezbędnych konkretnych decyzji i przejęcia kontroli w sytuacjach krytycznych lub w przypadku uszkodzenia pojazdu.
Współczesne SMRK potrafią dziś szybko wykrywać, identyfikować, lokalizować i neutralizować wiele rodzajów zagrożeń, w tym aktywność wroga w warunkach promieniowania, skażenia chemicznego czy biologicznego w różnych typach terenu. W rozwoju nowoczesnego SMRK głównym problemem jest stworzenie funkcjonalnie efektywnego projektu. Kluczowe kwestie obejmują konstrukcję mechaniczną, pokładowy zestaw czujników i systemy nawigacyjne, interakcję człowiek-robot, mobilność, komunikację oraz zużycie energii/energii.
Wymagania dotyczące interakcji człowiek-robot obejmują bardzo złożone interfejsy człowiek-maszyna, dlatego należy opracować multimodalne rozwiązania techniczne w celu zapewnienia bezpiecznych i przyjaznych dla użytkownika interfejsów. Obecna technologia interakcji człowiek-robot jest bardzo złożona i będzie wymagała wielu testów i oceny w realistycznych warunkach działania, aby osiągnąć dobry poziom niezawodności, zarówno w interakcji człowiek-robot, jak i interakcji robot-robot.

Uzbrojony SMRK opracowany przez estońską firmę MILREM
Celem projektantów jest pomyślny rozwój SMRK, zdolnego do wykonywania swojego zadania w dzień iw nocy w trudnym terenie. Aby osiągnąć maksymalną wydajność w każdej konkretnej sytuacji, SMRK musi być w stanie poruszać się po wszystkich rodzajach terenu z obecnością przeszkód z dużą prędkością, z dużą zwrotnością i szybką zmianą kierunku bez znacznego spadku prędkości. Parametry projektowe związane z mobilnością obejmują również charakterystyki kinematyczne (przede wszystkim zdolność do utrzymywania kontaktu z podłożem w każdych warunkach). SMRK ma, oprócz tej korzyści, że nie ma ograniczeń właściwych człowiekowi, ma również tę wadę, że konieczne jest zintegrowanie złożonych mechanizmów, które mogą zastąpić ruchy człowieka. Wymagania projektowe dotyczące jakości jazdy muszą być zintegrowane z technologiami wykrywania, a także rozwojem czujników i oprogramowania w celu uzyskania dobrej mobilności i unikania różnego rodzaju przeszkód.
Jednym z niezwykle istotnych wymagań warunkujących wysoką mobilność jest umiejętność korzystania z informacji o środowisku naturalnym (windy, roślinność, kamienie czy woda), obiektach sztucznych (mosty, drogi czy budynki), pogodzie oraz przeszkodach wroga (pola minowe czy zapory). W takim przypadku staje się możliwe określenie własnych pozycji i pozycji wroga, a dzięki zastosowaniu znacznej zmiany prędkości i kierunku znacznie zwiększają się szanse SMRK na przetrwanie pod ostrzałem wroga. Takie cechy techniczne umożliwiają opracowanie uzbrojonych rozpoznawczych SMRK zdolnych do wykonywania zadań rozpoznawczych, obserwacyjnych i wykrywania celów, misji ogniowych w obecności kompleksu uzbrojenia, a także zdolnych do samodzielnego wykrywania zagrożeń (min, systemów uzbrojenia wroga itp.) -cele obronne.
Wszystkie te zdolności bojowe muszą być wdrażane w czasie rzeczywistym, aby uniknąć zagrożeń i zneutralizować wroga przy użyciu własnych brońlub kanały komunikacji z systemami zdalnej broni. Niezwykle ważna jest duża mobilność oraz zdolność do lokalizowania i śledzenia celów wroga oraz jego aktywności w trudnych warunkach bojowych. Wymaga to opracowania inteligentnych SMRKów zdolnych do śledzenia aktywności wroga w czasie rzeczywistym dzięki wbudowanym złożonym algorytmom rozpoznawania ruchu.
Zaawansowane możliwości, w tym czujniki, algorytmy fuzji danych, aktywna wizualizacja i przetwarzanie danych, są bardzo ważne i wymagają nowoczesnej architektury sprzętowej i programowej. Podczas wykonywania zadania w nowoczesnym SMRK do oszacowania lokalizacji wykorzystuje się system GPS, bezwładnościową jednostkę pomiarową oraz bezwładnościowy system nawigacji.
Korzystając z danych nawigacyjnych uzyskanych za pośrednictwem tych systemów, SMRK może samodzielnie poruszać się zgodnie z poleceniami programu pokładowego lub systemu zdalnego sterowania. Jednocześnie SMRK jest w stanie w krótkich odstępach czasu przesyłać dane nawigacyjne do stacji zdalnego sterowania, dzięki czemu operator wie o jego dokładnej lokalizacji. W pełni autonomiczne SMRK mogą planować swoje działania, a do tego absolutnie konieczne jest opracowanie trasy wykluczającej kolizje, przy jednoczesnym zminimalizowaniu tak podstawowych parametrów jak czas, energia i odległość. Do wytyczania optymalnej trasy i jej korygowania można wykorzystać komputer nawigacyjny i komputer informacyjny (do skutecznego wykrywania przeszkód można wykorzystać dalmierze laserowe i czujniki ultradźwiękowe).
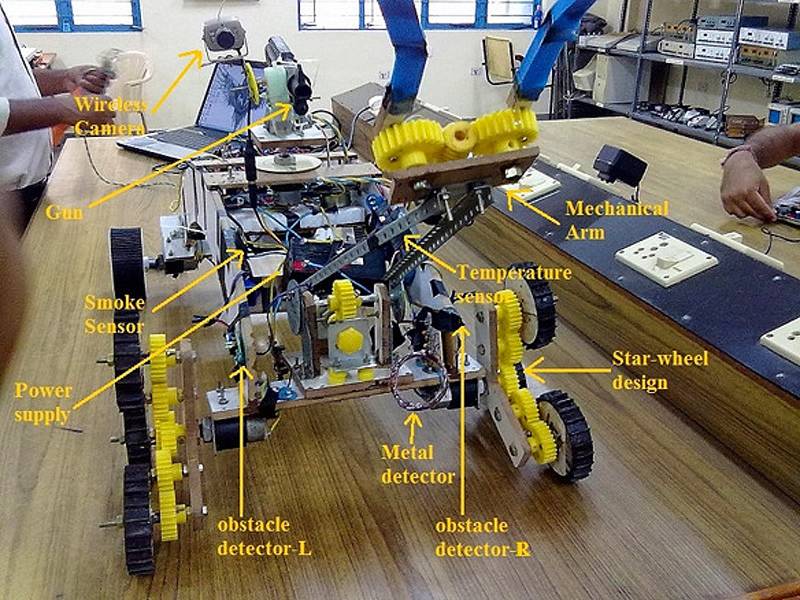
Elementy prototypowego uzbrojonego SMRK opracowanego przez indyjskich studentów
Projektowanie systemów nawigacyjnych i komunikacyjnych
Kolejną ważną kwestią w rozwoju skutecznego SMRK jest projekt systemu nawigacji/komunikacji. Kamery cyfrowe i czujniki są instalowane w celu zapewnienia wizualnej informacji zwrotnej, podczas gdy systemy podczerwieni są instalowane do pracy w nocy; operator może zobaczyć obraz wideo na swoim komputerze i wysłać kilka podstawowych poleceń nawigacyjnych do SMRK (w prawo/w lewo, stop, do przodu) w celu skorygowania sygnałów nawigacyjnych.
W przypadku w pełni autonomicznych SMRK systemy wizualizacji są integrowane z systemami nawigacyjnymi opartymi na mapach cyfrowych i danych GPS. Aby stworzyć w pełni autonomiczny SMRK, dla takich podstawowych funkcji jak np. nawigacja wymagana będzie integracja systemów postrzegania warunków zewnętrznych, planowania trasy i kanału komunikacyjnego.
Podczas gdy integracja systemów nawigacyjnych dla pojedynczych SMRK jest na zaawansowanym etapie, opracowywanie algorytmów do planowania jednoczesnej pracy kilku SMRK i wspólnych zadań SMRK i UAV jest na wczesnym etapie, ponieważ bardzo trudno jest nawiązać interakcję komunikacyjną kilku systemów robotycznych jednocześnie. Trwające eksperymenty pomogą określić, jakie częstotliwości i zakresy częstotliwości są potrzebne i jak będą się zmieniać wymagania dla konkretnego zadania. Po zdefiniowaniu tych cech będzie można opracować zaawansowane funkcje i oprogramowanie dla kilku zrobotyzowanych maszyn.

Bezzałogowy śmigłowiec K-MAX transportuje pojazd robota SMSS (Squad Mission Support System) podczas testów autonomii; podczas gdy pilot był w kokpicie K-MAX, ale go nie kontrolował
Środki łączności są bardzo ważne dla funkcjonowania SMRK, jednak rozwiązania bezprzewodowe mają dość istotne wady, ponieważ nawiązane połączenie może zostać utracone w wyniku zakłóceń związanych z terenem, przeszkodami lub działaniem systemu elektronicznego zwalczania przeciwnika. Ostatnie osiągnięcia w systemach komunikacji maszyna-maszyna są bardzo interesujące, a dzięki tym badaniom można stworzyć niedrogie i wydajne urządzenia do komunikacji między platformami robotów. Standard DRSC (Dedicated Short-Range Communication) dla specjalnej komunikacji krótkiego zasięgu będzie stosowany w rzeczywistych warunkach do komunikacji pomiędzy SMRK oraz pomiędzy SMRK a UAV. Wiele uwagi poświęca się obecnie zapewnieniu bezpieczeństwa komunikacji w operacjach sieciocentrycznych, dlatego przyszłe projekty z zakresu systemów zamieszkałych i niezamieszkanych powinny być oparte na zaawansowanych rozwiązaniach zgodnych ze wspólnymi standardami interfejsów.
Obecnie wymagania dotyczące krótkich zadań o niskim poborze mocy są w większości spełnione, ale występują problemy z platformami, które wykonują długotrwałe zadania o dużej mocy, w szczególności strumieniowanie wideo jest jednym z najbardziej palących problemów.
paliwo
Opcje źródła energii zależą od rodzaju systemu: dla małych SMR źródłem zasilania może być zaawansowany akumulator, ale dla większych SMR paliwo konwencjonalne może generować niezbędną energię, co pozwala na realizację schematu z silnikiem-generatorem lub nowej generacji hybrydowego napędu elektrycznego. Najbardziej oczywistymi czynnikami wpływającymi na dostawy energii są środowisko, waga i wymiary maszyny oraz czas potrzebny na wykonanie zadania. W niektórych przypadkach układ zasilania musi składać się z układu paliwowego jako głównego źródła i akumulatora (słaba widoczność). Dobór odpowiedniego rodzaju energii zależy od wszystkich czynników wpływających na wykonanie zadania, a źródło energii musi zapewniać wymaganą mobilność, nieprzerwaną pracę systemu łączności, zestawu czujników i systemu uzbrojenia (jeśli występuje).
Ponadto konieczne jest rozwiązywanie problemów technicznych związanych z poruszaniem się w trudnym terenie, postrzeganiem przeszkód i samokorekcją błędnych działań. W ramach nowoczesnych projektów opracowano nowe zaawansowane technologie robotyczne dotyczące integracji czujników pokładowych i przetwarzania danych, wyboru trasy i nawigacji, wykrywania, klasyfikacji i omijania przeszkód, a także eliminacji błędów związanych z utratą łączności i destabilizacją platformy . Autonomiczna nawigacja terenowa wymaga od pojazdu rozpoznawania terenu, w tym orografii terenu 3D (opis terenu) oraz wykrywania przeszkód, takich jak skały, drzewa, stojąca woda itp. Ogólne możliwości stale rosną i już dziś możemy mówić o dość wysokim poziomie określania obrazu terenu, ale tylko w dzień i przy dobrej pogodzie, natomiast możliwości platform robotycznych w nieznanej przestrzeni i w złych warunkach pogodowych są wciąż niewystarczające. W związku z tym DARPA prowadzi kilka eksperymentalnych programów, które testują możliwości platform robotycznych w nieznanym terenie, przy każdej pogodzie, w dzień iw nocy. Program DARPA o nazwie Applied Research in AI (Applied Research in Artificial Intelligence) prowadzi badania nad inteligentnymi narzędziami decyzyjnymi i innymi zaawansowanymi rozwiązaniami technologicznymi dla systemów autonomicznych w celu konkretnego zastosowania w zaawansowanych systemach robotycznych oraz opracowuje autonomicznego multirobota poznanie algorytmów wykonywania wspólnych zadań, które pozwolą grupom robotów na automatyczne przetwarzanie nowych zadań i redystrybucję ról między sobą.
Jak już wspomniano, warunki pracy i rodzaj zadania determinują projekt nowoczesnego SMRK, który jest platformą mobilną ze źródłem zasilania, czujnikami, komputerami i architekturą oprogramowania do percepcji, nawigacji, komunikacji, uczenia się/adaptacji, interakcji między robota i człowieka. W przyszłości będą one bardziej wielostronne, będą miały wyższy poziom unifikacji i interakcji, a także będą bardziej efektywne z ekonomicznego punktu widzenia. Szczególnie interesujące są systemy o modułowej ładowności, co pozwala na dostosowanie maszyn do różnych zadań. W następnej dekadzie zrobotyzowane pojazdy staną się dostępne do wykonywania operacji taktycznych oraz ochrony baz i innej infrastruktury opartej na otwartej architekturze. Charakteryzować się będą znacznym poziomem jednolitości i autonomii, wysoką mobilnością oraz modułowymi systemami pokładowymi.
Technologia SMRK do zastosowań wojskowych szybko się rozwija, co pozwoli wielu siłom zbrojnym usunąć żołnierzy z niebezpiecznych zadań, w tym wykrywania i niszczenia IED, rozpoznania, obrony swoich sił, rozminowywania i innych. Na przykład koncepcja brygadowych zespołów bojowych US Army, poprzez zaawansowane modelowanie komputerowe, szkolenie bojowe i doświadczenie w rzeczywistych operacjach bojowych, wykazała, że pojazdy zrobotyzowane zwiększyły przeżywalność pojazdów naziemnych z załogami i przyczyniły się do znacznego wzrostu skuteczności bojowej. Rozwój obiecujących technologii, takich jak mobilność, autonomia, uzbrojenie, interfejsy człowiek-maszyna, sztuczna inteligencja dla systemów robotycznych, integracja z innymi SMRK i systemami zamieszkałymi, zwiększy możliwości niezamieszkanych systemów naziemnych i ich poziom autonomii.


Rosyjski kompleks robotów uderzeniowych Platform-M opracowany przez NITI "Postęp"
Użyte materiały:
www.obrona-update.com
www.qinetiq.com
www.milrem.ee
www.darpa.mil
www.airforce.com
www.niti-progress.ru
www.wikipedia.org
pl.wikipedia.org
informacja