Zapewnienie działania systemów obrony powietrznej przed celami nisko latającymi bez udziału lotnictwa Sił Powietrznych
Krzywizna powierzchni ziemi i nierówności terenu poważnie ograniczają zdolność naziemnych i okrętowych systemów obrony przeciwlotniczej do wykrywania i zwalczania nisko latającej broni przeciwlotniczej (LWS). Jak skutecznie zapewnić zdolność systemów obrony przeciwlotniczej do strzelania do nisko latających celów?
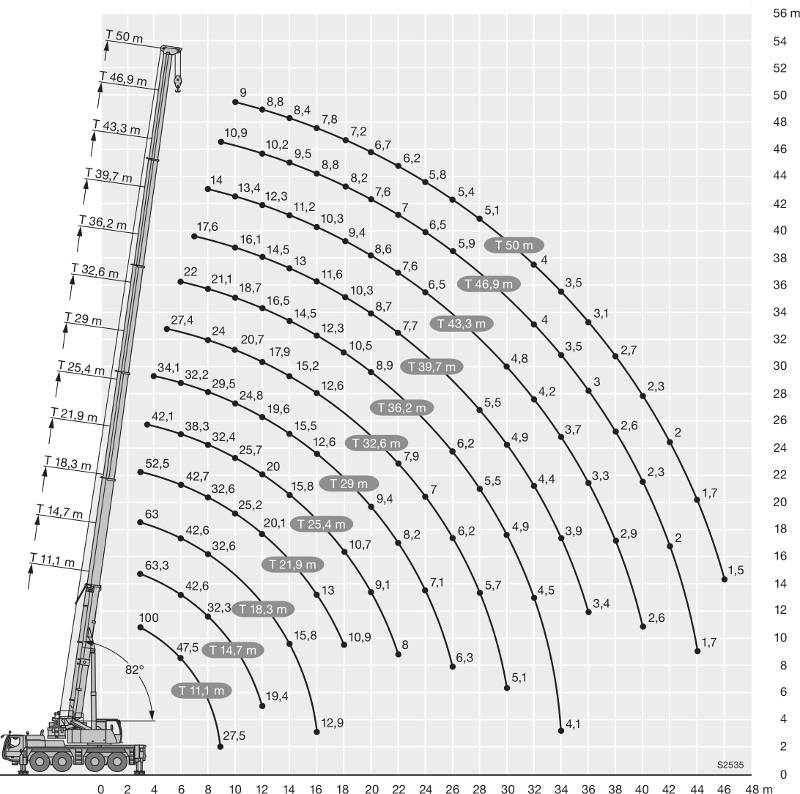
Jedną z opcji jest umieszczenie radaru na urządzeniu do podnoszenia masztu (PMU). Jeśli umieścimy radar na wysokości 15 metrów, to zasięg widzialności samolotu (LA) poruszającego się na wysokości 50 metrów nad powierzchnią wyniesie 41 km. Zwiększenie wysokości PMU do 50 metrów zwiększy teoretyczny zasięg widoczności tylko o 13 km (do 54 km), natomiast złożoność i masywność takiego sprzętu wzrośnie w znacznie większym stopniu.
Wydawałoby się, że jest to całkiem normalne dla systemów obrony powietrznej krótkiego zasięgu typu Pantsir-SM? Ale w praktyce nierówny teren, lasy, budynki i inne naturalne i sztuczne przeszkody zmniejszą tę wartość kilkukrotnie.
Jaka jest minimalna wysokość, na jaką należy podnieść radar, aby zapewnić wykrywanie celów nisko latających?
Wysokość, do której należy podnieść środki wykrywania, aby skompensować nierówny teren, może różnić się w zależności od przypadku. W większości przypadków różnica wysokości na płaskim terytorium Rosji w zakresie 100-200 km nie przekracza 100-200 metrów. Na terenach górskich różnica może być znacznie większa i trudno wskazać konkretną wartość.
Konwencjonalnie w przypadku systemów obrony powietrznej krótkiego zasięgu (do 40-50 km) można przyjąć wysokość niezbędną do wyrównania nierówności terenu na 100 metrów, w przypadku systemów obrony powietrznej średniego zasięgu (do 50-150 km) wysokość niezbędna do wyrównania nierówności terenu wyniesie 200 metrów.
Tak więc minimalna wysokość umieszczenia radaru do wykrywania nisko latających celów dla systemów obrony powietrznej krótkiego zasięgu będzie wynosić około 200 metrów, a dla systemów obrony powietrznej średniego zasięgu około 700 metrów. Wysokość radaru, aby zapewnić pozahoryzontalne działanie systemów obrony powietrznej dalekiego zasięgu, powinna być porównywalna z wysokością lotu samolotów AWACS, około 10 000 m, w tym przypadku teren odgrywa znacznie mniejszą rolę.
Te wysokości uniemożliwiają korzystanie z PMU, ale istnieje kilka innych sposobów „spojrzenia poza horyzont”.
Jedną z tych metod jest użycie balonów. Projekt JLENS jest wdrażany w USA. W ramach tego projektu planuje się umieszczenie sprzętu radarowego i optycznego rozpoznania na balonach zamocowanych w niektórych częściach kraju i przeznaczonych do wykrywania nisko latających pocisków manewrujących. Wysokość balonów wynosi 3 - 4,5 km, masa ładunku około trzech ton. Zasięg wykrywania celów powietrznych powinien wynosić około 550 km, celów naziemnych około 225 km. Oprócz wykrywania balon JLENS musi zapewniać pozahoryzontalne oznaczenie celu dla pocisków ziemia-powietrze. Aby utrzymać balon w odpowiedniej pozycji i wymieniać dane, należy użyć kabla, który zawiera kable zasilające i światłowodowe kable danych w powłoce węglowej.

W ramach rozważanego zadania projekt ten ma kilka wad: balon nie jest zbyt wygodny do ciągłego przemieszczania się po drogach i, jeśli to możliwe, musi być przywiązany do określonego punktu, co wyklucza możliwość zmiany pozycji za pomocą telefonu komórkowego systemów obrony powietrznej i jest niedopuszczalne. Dodatkowo ogromne rozmiary balonu (długość ponad 70 metrów) mogą teoretycznie uniemożliwić jego działanie w warunkach silnych, porywistych wiatrów.
Z drugiej strony sama koncepcja jest dość obiecująca. Radary umieszczone na balonach mogą osłaniać nieruchome obiekty z nisko latających ataków IOS, przede wszystkim takie jak silosy międzykontynentalnych pocisków balistycznych (ICBM), bazy okrętów podwodnych, lotniskowce pocisków balistycznych, lotniska bombowców strategicznych, elektrownie jądrowe i inne krytyczne elementy sił zbrojnych kraju i infrastruktura .
Tak więc, mimo że balony nie są najlepszym sposobem na zapewnienie systemom obrony przeciwlotniczej możliwości uderzania w cele na horyzoncie, mogą odegrać ważną rolę w osłanianiu krytycznych obiektów nieruchomych przed nagłym atakiem nisko latających systemów przeciwlotniczych wroga. . Ich główną zaletą jest możliwość niemal ciągłego przebywania w powietrzu bez znacznych kosztów paliwa i energii elektrycznej.
W Rosji takie balony opracowuje RosAeroSystems. W szczególności możemy rozważyć wysokoobjętościowy balon na uwięzi PUMA. Balon Puma został zaprojektowany jako nośnik radarowy do całodobowego nadzoru radarowego z wysokości do 5 km przez 30 dni bez lądowania.
Szacowany promień wykrywania i śledzenia celów powietrznych wyniesie 300-350 km. Balon musi wytrzymać huraganowe wiatry do 46 m/s oraz bezpośrednie uderzenia piorunów. Balon jest przytrzymywany liną kablową podczas wznoszenia, schodzenia i parkowania na wysokości roboczej, zapewnia również zasilanie systemów pokładowych i ładowności o mocy do 40 kW, a także usuwanie piorunów i elektryczność statyczna. Ładowność balonu PUMA wynosi do 2250 kg.

Podobno siły zbrojne Federacji Rosyjskiej pracują w tym kierunku:
Zależy to od koncernu Almaz-Antey, konieczne jest, aby balony i sterowce mogły nie tylko ostrzegać przed zagrożeniem atakiem powietrznym, ale także bezpośrednie przeciwlotnicze pociski kierowane (SAM) wyposażone w aktywną głowicę naprowadzającą radar (ARGSN) na zidentyfikowane cele.
Wróćmy do SAM. Na początek rozważmy systemy obrony powietrznej krótkiego i średniego zasięgu, dla których wymagane jest podniesienie radaru na wysokość odpowiednio 200 i 700 metrów.
Na początku 2018 roku Boeing przedstawił prototypowy elektryczny bezzałogowy kwadrokopter. Ten UAV jest przeznaczony do testowania i debugowania technologii potrzebnych do stworzenia nowej generacji samolotów towarowych i pasażerskich. Długość prototypowego UAV wynosi 4,57 metra, szerokość 5,49 metra, wysokość 1,22 metra, waga łącznie z wagą akumulatorów 339 kilogramów. Ładowność - do 226 kg. Konstrukcja obejmuje cztery silniki elektryczne z ośmioma wirnikami.
Prezentacja quadrocoptera cargo Boeinga
Elektryczne quadkoptery-UAV mogą być skutecznym rozwiązaniem do wykrywania nisko lecących EOS dla naziemnych i morskich systemów obrony przeciwlotniczej.
Elektryczny quadkopter-UAV musi być umieszczony na pojeździe nośnym, należy tam również umieścić zespół generatora diesla (DGU), aby zapewnić UAV energię elektryczną. Niestety na chwilę obecną moc silników elektrycznych eksperymentalnego quadkoptera, czas ładowania akumulatora oraz czas lotu nie są znane.
Można rozważyć dwie opcje:
- w pierwszym wariancie brak baterii niezbędnych do utrzymania długiego lotu, zasilanie z pojazdu nośnego, jest tylko niewielka bateria zapasowa do awaryjnego lądowania UAV, przypuszczalnie ta opcja może być uznana za optymalną;
- druga opcja może być wykorzystana, jeśli masa kabla potrzebnego do dostarczenia wymaganej mocy do quadkoptera jest zbyt duża, w takim przypadku quadkopter powinien być wyposażony w akumulatory lub superkondensatory (jonizatory) z funkcją szybkiego ładowania.
Aby zapewnić ciągłość w powietrzu, cztery systemy obrony powietrznej krótkiego zasięgu wymagają co najmniej dwóch pojazdów nośnych z bezzałogowymi statkami powietrznymi. Czas spędzony przez UAV w powietrzu będzie ograniczony jedynie dostępnością paliwa dla DGU.
Zamiast elektrycznego quadkoptera można zastosować UAV oparty na silnikach tłokowych benzynowych lub wysokoprężnych. W Rosji opracowaniem i produkcją takich rozwiązań zajmuje się firma SKYF Technology, która oferuje klientowi BSP pionowego startu i lądowania SKYF. W tej chwili nośność UAV SKYF wynosi 250 kilogramów z perspektywą zwiększenia do 400 kilogramów. Wysokość lotu tego UAV wynosi do 3000 metrów.

Demonstracja lotu UAV SKYF
Prezentacja UAV SKYF
Wcześniej Gorizont zaprezentował bezzałogowy statek powietrzny typu śmigłowcowego Horizon Air S-100 z wszechstronnym radarem, opartym na austriackim Schiebel Camcopter S-100. Wszechstronny radar Kolibri zamontowany na tym BSP, zainstalowany w dolnej części kadłuba, jest opracowywany wspólnie z Moskiewskim Naukowo-Badawczym Instytutem Radiofizyki. Całkowita masa sprzętu radarowego nie powinna przekraczać 6,5 kg, wymagany zasięg w trybie widzenia dookoła (zawis BSP) to co najmniej 200 km, w trybie apertury syntetycznej co najmniej 20 km.
Ładowność tego UAV jest zbyt mała (35 kg), aby pomieścić radar o akceptowalnych parametrach, ale może być interesująca jako koncepcja. Czas ciągłego przebywania w powietrzu to 6 godzin.

Podane przykłady kwadrokopterów-UAV nie mogą być bezpośrednio wykorzystywane do rozmieszczania radarów, ponieważ mają stosunkowo skromną ładowność, ale nie ma wątpliwości, że ich konstrukcje będą aktywnie rozwijane i ulepszane. Przede wszystkim dotyczy to elektrycznych quadrocopterów-UAV.
Głównymi wymaganiami dla UAV AWACS typu quadrocopter lub UAV-AWACS typu śmigłowca powinna być wysoka niezawodność i możliwość długotrwałego przebywania w powietrzu, przy zapewnieniu określonych osiągów w locie (LTH), a także wysokich zasobów i niski koszt za godzinę lotu.
W przypadku systemów obrony przeciwlotniczej dalekiego zasięgu bezzałogowy statek powietrzny do pionowego startu i lądowania nie będzie już skutecznym i wystarczającym środkiem rozpoznania, ponieważ wysokość radaru, aby uzyskać zasięg widzenia około 400 km, musi przekraczać 10 000 metrów.
Przypuszczalnie, jako latający radar dla systemów obrony powietrznej dalekiego zasięgu, można zastosować UAV o długim czasie lotu, typ samolotu, średnie lub duże wymiary.
Jeden z kandydatów do roli obiecującego warkot-DRLO może stać się UAV Altair o masie startowej 5 ton i ładowności 1-2 tony. Ten UAV powstaje w ramach projektu badawczego Altius-M w Biurze Projektowym Sokol (Kazań) wspólnie z firmą Transas. Czas lotu powinien wynosić do 48 godzin, zasięg lotu wynosi 10 000 km. W 2018 roku program Altair UAV został przeniesiony do Uralskich Zakładów Cywilnych lotnictwo„(UZGA). Testy w locie BSP Altair powinny rozpocząć się w 2019 roku.

Urządzenia tego typu są rozwijane w innych krajach. W szczególności chińska firma CETC opracowuje UAV JY-300. Urządzenie średniej wielkości powinno stać się nośnikiem anten konforemnych i służyć jako bezzałogowy AWACS. Według wstępnych danych JY-300 UAV ma masę startową około 1300 kg i może przenosić ładowność 400 kg. Jest w stanie latać do 12 godzin na wysokości do 7,6 km. Radary wbudowane w konstrukcję tego drona powinny umożliwiać wykrywanie celów powietrznych i morskich z dużych odległości.

Rosyjskie UAV o średnich i dużych gabarytach borykają się z wieloma problemami, w tym brakiem kompaktowych, mocnych i ekonomicznych silników krajowych, brakiem nowoczesnej awioniki. Jednym z najważniejszych problemów jest brak szybkich satelitarnych kanałów transmisji danych o globalnym zasięgu, które umożliwiają sterowanie bezzałogowym statkiem powietrznym i odbieranie od niego informacji wywiadowczych z dużej odległości od bazy macierzystej.
Użycie bezzałogowych statków powietrznych AWACS o długim czasie lotu nie wymaga obowiązkowej obecności takich kanałów. Ogólnie rzecz biorąc, praca kombinacji systemów obrony przeciwlotniczej dalekiego zasięgu – długodystansowego bezzałogowca może wyglądać tak:
Bezzałogowy statek powietrzny dalekiego zasięgu AWACS startuje z lotniska i wchodzi w strefę patrolowania nad stanowiskami warstwowej obrony przeciwlotniczej. Wszystkie informacje z niego przesyłane są do operatorów systemów obrony powietrznej dalekiego zasięgu, a dalej, poprzez punkt kierowania walką, do operatorów innych systemów obrony powietrznej wchodzących w skład połączonego warstwowego systemu obrony powietrznej. Lot UAV powinien odbywać się w większości w trybie automatycznym po danej trajektorii. Jeden system obrony powietrznej dalekiego zasięgu powinien zawierać dwa AWACS. W takim przypadku mogą pełnić służbę bojową w systemie zmianowym nad pozycjami systemu obrony powietrznej przez 36-48 godzin, w zależności od oddalenia od macierzystego lotniska.
Wymagania dla UAV dalekiego zasięgu AWACS są takie same, jak dla UAV dla systemów obrony powietrznej krótkiego i średniego zasięgu - wysoki zasób operacyjny i niski koszt na godzinę lotu.
Może pojawić się pytanie: tytuł artykułu odnosi się do pracy systemów obrony powietrznej na nisko latających celach bez udziału lotnictwa Sił Powietrznych, a UAV o długim czasie lotu są wyraźnie związane z lotnictwem. Tutaj pytanie dotyczy raczej przynależności wydziałowej. W Stanach Zjednoczonych na mocy umowy Johnson-McConnell między armią a Siłami Powietrznymi śmigłowce nie należą do Sił Powietrznych i są bezpośrednio podporządkowane Armii USA, działają w jej interesie (podział samolotów w Stanach Zjednoczonych między Armia i Siły Powietrzne są dobrze napisane tutaj). Tak więc w naszym przypadku przynależność UAV do konkretnego systemu obrony przeciwlotniczej nie pozwoli na wykorzystanie go przez Siły Powietrzne do innych celów.
Zastosowanie bezzałogowych statków powietrznych AWACS typu quadkopter oraz bezzałogowych statków powietrznych dalekiego zasięgu AWACS zapewni gęste pokrycie radarowe obszaru i umożliwi wyznaczanie celów pociskom z ARGSN i naprowadzaczem IR na maksymalnym zasięgu.
Przypuszczalnie dla dwóch systemów obrony powietrznej krótkiego zasięgu powinien być jeden pojazd z AWACS typu quadkopter lub dwa pojazdy dla czterech systemów obrony powietrznej. System obrony powietrznej średniego zasięgu powinien obejmować dwa pojazdy z AWACS typu quadrocopter. Dwa bezzałogowe statki powietrzne AWACS dalekiego zasięgu należy zaklasyfikować jako systemy obrony powietrznej dalekiego zasięgu.
W okresie zagrożenia lub w przypadku wybuchu działań wojennych bezzałogowe statki powietrzne dalekiego zasięgu muszą prowadzić ciągłe patrole nad pozycjami systemu obrony powietrznej. UAV typu quadrocopter, z zestawu systemów obrony powietrznej krótkiego i średniego zasięgu, muszą znajdować się na pojazdach przewoźnika w gotowości do natychmiastowego startu. W przypadku wykrycia zagrożenia z powietrza wystrzelenie bezzałogowego statku powietrznego typu quadrocopter powinno nastąpić w ciągu kilku minut.
Koszt samych UAV i czasu ich lotu jest tradycyjnie znacznie niższy niż koszt załogowych samolotów i śmigłowców, co czyni to zadanie atrakcyjnym ekonomicznie. Proponowana technicznie koncepcja również nie zawiera problemów nie do pokonania.
W przypadku obiektów nieruchomych o dużym znaczeniu można zastosować balony AWACS. W przypadku obrony przeciwlotniczej obiektów wyposażonych w balony AWACS, długodystansowe bezzałogowce nie są wymagane i mogą być wyłączone z systemów obrony przeciwlotniczej dalekiego zasięgu lub mogą być na lotnisku gotowe do startu jako zapasowe środki rozpoznania i celu Przeznaczenie.
Wcześniej rozważano jedynie wykorzystanie bezzałogowych statków powietrznych AWACS w interesie naziemnych systemów obrony powietrznej. Ale nie mniej, a być może ważniejszym zadaniem jest wykorzystanie bezzałogowych statków powietrznych typu quadkopter AWACS oraz bezzałogowców o długim czasie lotu w interesie obrony przeciwlotniczej okrętów wojennych. flota (Marynarka wojenna). Biorąc pod uwagę fakt, że nie mamy na nich lotniskowców, a tym samym samolotów AWACS, nowoczesne rosyjskie okręty są słabo chronione przed atakami z powietrza, niezależnie od rodzaju posiadanej obrony przeciwlotniczej, ze względu na fizyczne ograniczenia w zasięgu wykrywania niskich latające cele.
Zastosowanie bezzałogowych statków powietrznych typu quadrocopter na okrętach rosyjskiej marynarki wojennej znacznie przesunie granicę niszczenia celów nisko latających. A wysłanie bezzałogowych statków powietrznych o długim czasie lotu i zasięgu w rejon, w którym znajdują się okręty Marynarki Wojennej, da im dodatkowe możliwości rozpoznania sił wroga i wydawania oznaczeń celów dla pocisków bronie daleki zasięg.

Nie można wykluczyć użycia balonów i sterowców AWACS w interesie Marynarki Wojennej, zwłaszcza że historyczny istnieją przykłady użycia balonów przez rosyjską flotę.
Obrona powietrzna naziemna i naziemna bez możliwości atakowania celów nisko latających z dużej odległości zostanie pokonana.
Aby rozwiązać ten problem, w interesie systemów obrony powietrznej krótkiego i średniego zasięgu, konieczne jest stworzenie bezzałogowego statku powietrznego typu quadrocopter AWACS, najlepiej z zasilaniem kablem z pojazdu nośnego.
W przypadku systemów obrony powietrznej dalekiego zasięgu konieczne jest zintensyfikowanie rozwoju BSP dalekiego zasięgu AWACS.
W przypadku obiektów nieruchomych o dużym znaczeniu można zastosować balony AWACS.
Wszystkie powyższe systemy (bezzałogowce AWACS typu quadkopter, długodystansowe bezzałogowe statki powietrzne AWACS i balony AWACS) mają ogromne znaczenie dla poprawy skuteczności i przetrwania nie tylko naziemnych systemów obrony powietrznej, ale także okrętów Marynarki Wojennej Rosji.
wspinać się wyżej
Jedną z opcji jest umieszczenie radaru na urządzeniu do podnoszenia masztu (PMU). Jeśli umieścimy radar na wysokości 15 metrów, to zasięg widzialności samolotu (LA) poruszającego się na wysokości 50 metrów nad powierzchnią wyniesie 41 km. Zwiększenie wysokości PMU do 50 metrów zwiększy teoretyczny zasięg widoczności tylko o 13 km (do 54 km), natomiast złożoność i masywność takiego sprzętu wzrośnie w znacznie większym stopniu.
Możliwości nowoczesnych dźwigów samochodowych umożliwiają podnoszenie ładunku o wadze 9 ton na wysokość do 50 metrów, co umożliwia umieszczenie radarów na PMU o podobnej konstrukcji do wykrywania nisko latających celów
Wydawałoby się, że jest to całkiem normalne dla systemów obrony powietrznej krótkiego zasięgu typu Pantsir-SM? Ale w praktyce nierówny teren, lasy, budynki i inne naturalne i sztuczne przeszkody zmniejszą tę wartość kilkukrotnie.
Jaka jest minimalna wysokość, na jaką należy podnieść radar, aby zapewnić wykrywanie celów nisko latających?
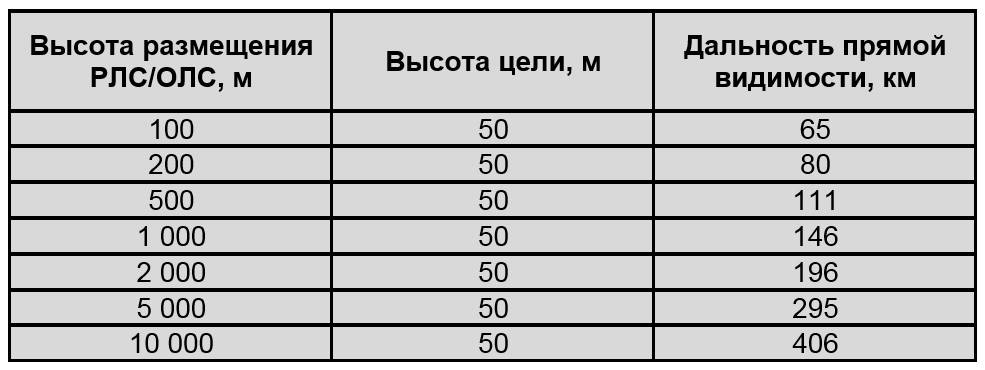
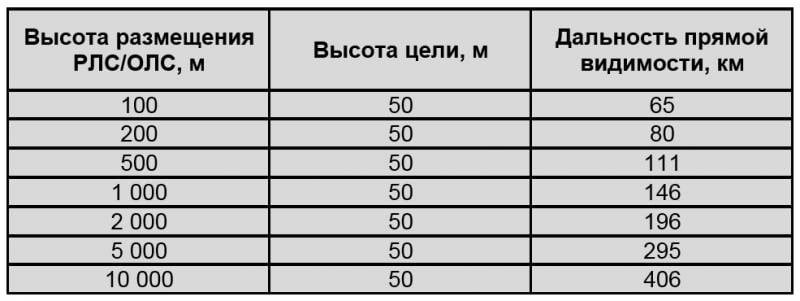
Zasięg w linii widzenia w zależności od wysokości środków wykrywania, bez uwzględniania terenu
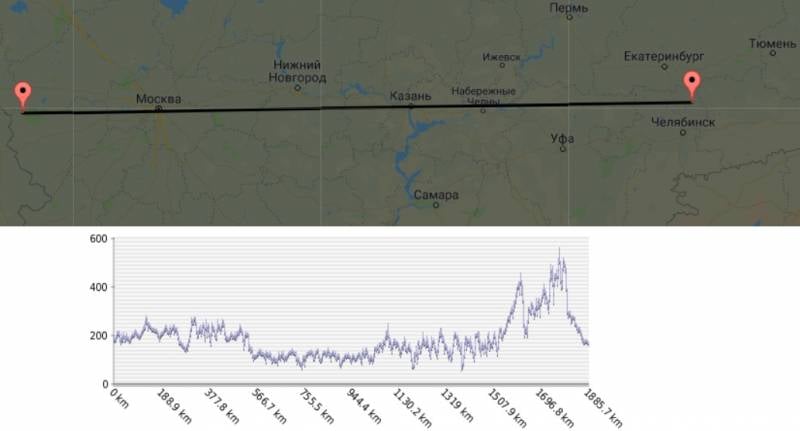
Wysokość, do której należy podnieść środki wykrywania, aby skompensować nierówny teren, może różnić się w zależności od przypadku. W większości przypadków różnica wysokości na płaskim terytorium Rosji w zakresie 100-200 km nie przekracza 100-200 metrów. Na terenach górskich różnica może być znacznie większa i trudno wskazać konkretną wartość.
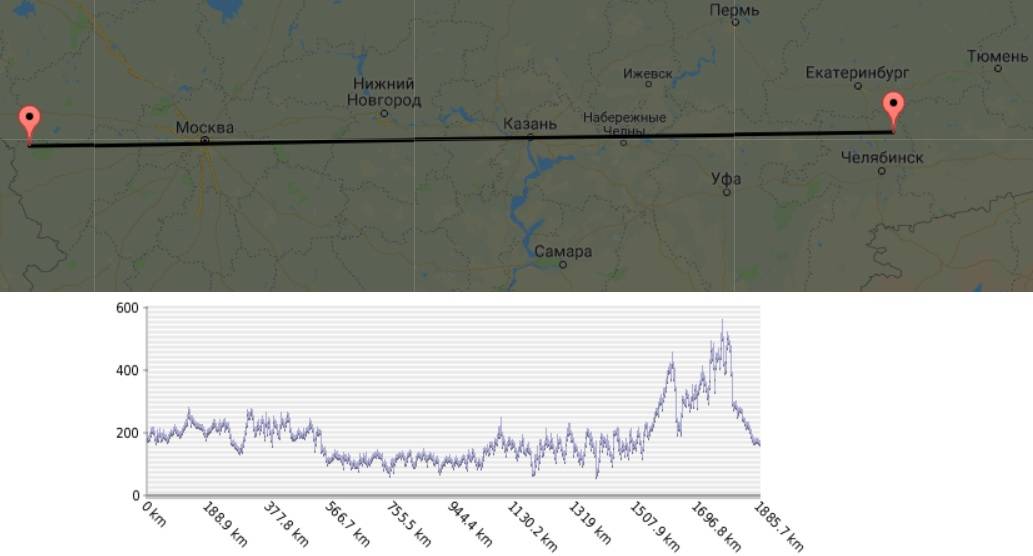
Profil elewacji
Konwencjonalnie w przypadku systemów obrony powietrznej krótkiego zasięgu (do 40-50 km) można przyjąć wysokość niezbędną do wyrównania nierówności terenu na 100 metrów, w przypadku systemów obrony powietrznej średniego zasięgu (do 50-150 km) wysokość niezbędna do wyrównania nierówności terenu wyniesie 200 metrów.
Tak więc minimalna wysokość umieszczenia radaru do wykrywania nisko latających celów dla systemów obrony powietrznej krótkiego zasięgu będzie wynosić około 200 metrów, a dla systemów obrony powietrznej średniego zasięgu około 700 metrów. Wysokość radaru, aby zapewnić pozahoryzontalne działanie systemów obrony powietrznej dalekiego zasięgu, powinna być porównywalna z wysokością lotu samolotów AWACS, około 10 000 m, w tym przypadku teren odgrywa znacznie mniejszą rolę.
Te wysokości uniemożliwiają korzystanie z PMU, ale istnieje kilka innych sposobów „spojrzenia poza horyzont”.
Radar na balonie
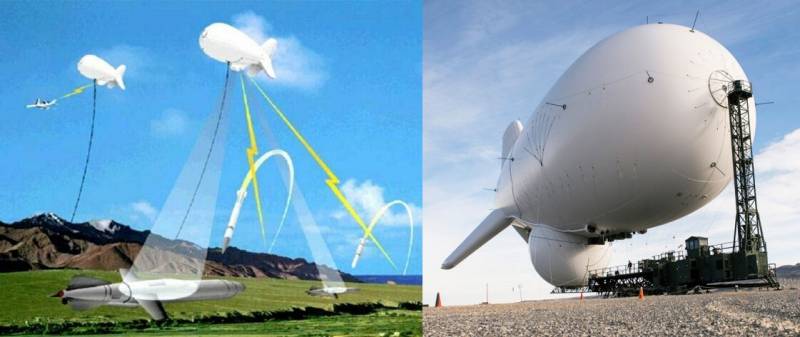
Jedną z tych metod jest użycie balonów. Projekt JLENS jest wdrażany w USA. W ramach tego projektu planuje się umieszczenie sprzętu radarowego i optycznego rozpoznania na balonach zamocowanych w niektórych częściach kraju i przeznaczonych do wykrywania nisko latających pocisków manewrujących. Wysokość balonów wynosi 3 - 4,5 km, masa ładunku około trzech ton. Zasięg wykrywania celów powietrznych powinien wynosić około 550 km, celów naziemnych około 225 km. Oprócz wykrywania balon JLENS musi zapewniać pozahoryzontalne oznaczenie celu dla pocisków ziemia-powietrze. Aby utrzymać balon w odpowiedniej pozycji i wymieniać dane, należy użyć kabla, który zawiera kable zasilające i światłowodowe kable danych w powłoce węglowej.
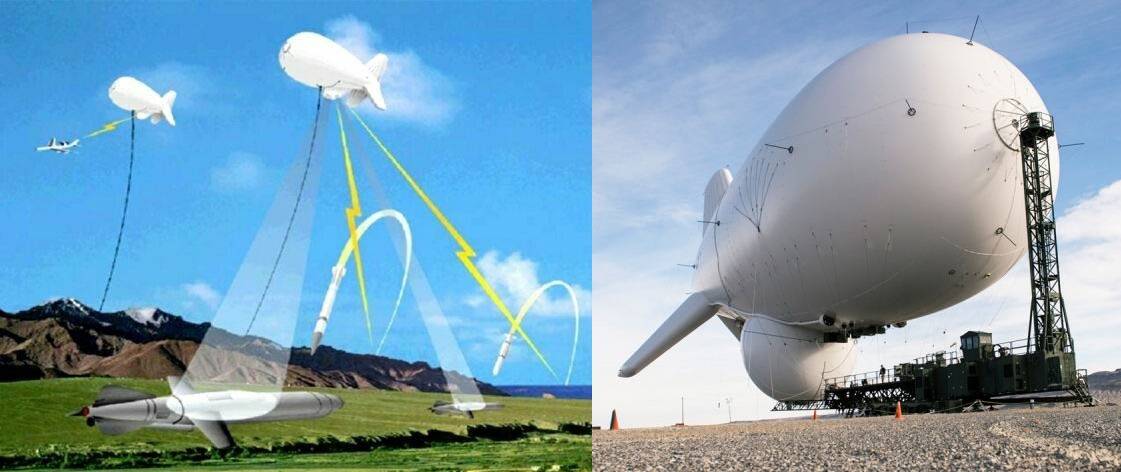
Zasada działania i sam balon projektu JLENS

Maszyna do tkania preform z włókna węglowego, mniej więcej to samo może wytworzyć powłokę kabla o wysokiej wytrzymałości
W ramach rozważanego zadania projekt ten ma kilka wad: balon nie jest zbyt wygodny do ciągłego przemieszczania się po drogach i, jeśli to możliwe, musi być przywiązany do określonego punktu, co wyklucza możliwość zmiany pozycji za pomocą telefonu komórkowego systemów obrony powietrznej i jest niedopuszczalne. Dodatkowo ogromne rozmiary balonu (długość ponad 70 metrów) mogą teoretycznie uniemożliwić jego działanie w warunkach silnych, porywistych wiatrów.
Z drugiej strony sama koncepcja jest dość obiecująca. Radary umieszczone na balonach mogą osłaniać nieruchome obiekty z nisko latających ataków IOS, przede wszystkim takie jak silosy międzykontynentalnych pocisków balistycznych (ICBM), bazy okrętów podwodnych, lotniskowce pocisków balistycznych, lotniska bombowców strategicznych, elektrownie jądrowe i inne krytyczne elementy sił zbrojnych kraju i infrastruktura .
Tak więc, mimo że balony nie są najlepszym sposobem na zapewnienie systemom obrony przeciwlotniczej możliwości uderzania w cele na horyzoncie, mogą odegrać ważną rolę w osłanianiu krytycznych obiektów nieruchomych przed nagłym atakiem nisko latających systemów przeciwlotniczych wroga. . Ich główną zaletą jest możliwość niemal ciągłego przebywania w powietrzu bez znacznych kosztów paliwa i energii elektrycznej.
W Rosji takie balony opracowuje RosAeroSystems. W szczególności możemy rozważyć wysokoobjętościowy balon na uwięzi PUMA. Balon Puma został zaprojektowany jako nośnik radarowy do całodobowego nadzoru radarowego z wysokości do 5 km przez 30 dni bez lądowania.
Szacowany promień wykrywania i śledzenia celów powietrznych wyniesie 300-350 km. Balon musi wytrzymać huraganowe wiatry do 46 m/s oraz bezpośrednie uderzenia piorunów. Balon jest przytrzymywany liną kablową podczas wznoszenia, schodzenia i parkowania na wysokości roboczej, zapewnia również zasilanie systemów pokładowych i ładowności o mocy do 40 kW, a także usuwanie piorunów i elektryczność statyczna. Ładowność balonu PUMA wynosi do 2250 kg.
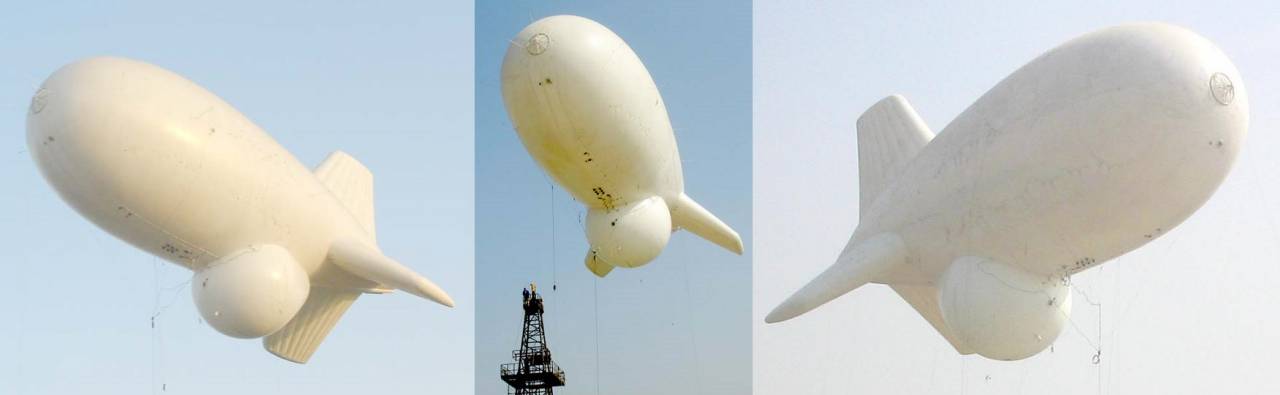
Balon na uwięzi o dużej objętości „PUMA”
Podobno siły zbrojne Federacji Rosyjskiej pracują w tym kierunku:
W lipcu 2015 roku Władimir Michejew, Doradca Pierwszego Zastępcy Dyrektora Generalnego Koncernu Technologii Radioelektronicznych (KRET), powiedział RIA Aktualności o rozpoczęciu prac nad projektem sterowca na potrzeby obrony przeciwrakietowej kraju. Może stać się pełnoprawnym elementem systemu ostrzegania przed atakiem rakietowym (SPRN), który dziś składa się z dwóch rzutów – orbitalnej konstelacji satelity i naziemnych stacji radarowych.
Zależy to od koncernu Almaz-Antey, konieczne jest, aby balony i sterowce mogły nie tylko ostrzegać przed zagrożeniem atakiem powietrznym, ale także bezpośrednie przeciwlotnicze pociski kierowane (SAM) wyposażone w aktywną głowicę naprowadzającą radar (ARGSN) na zidentyfikowane cele.
Quadkoptery i inne bezzałogowe statki powietrzne (UAV) do pionowego startu i lądowania
Wróćmy do SAM. Na początek rozważmy systemy obrony powietrznej krótkiego i średniego zasięgu, dla których wymagane jest podniesienie radaru na wysokość odpowiednio 200 i 700 metrów.
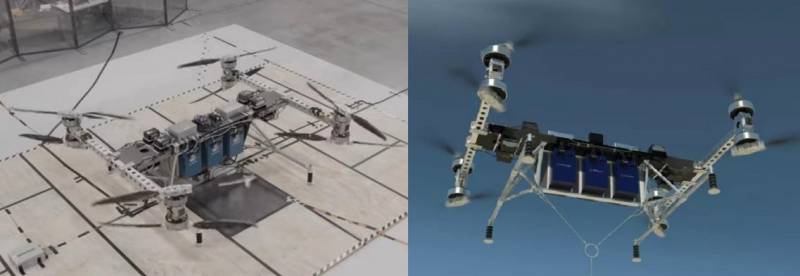
Na początku 2018 roku Boeing przedstawił prototypowy elektryczny bezzałogowy kwadrokopter. Ten UAV jest przeznaczony do testowania i debugowania technologii potrzebnych do stworzenia nowej generacji samolotów towarowych i pasażerskich. Długość prototypowego UAV wynosi 4,57 metra, szerokość 5,49 metra, wysokość 1,22 metra, waga łącznie z wagą akumulatorów 339 kilogramów. Ładowność - do 226 kg. Konstrukcja obejmuje cztery silniki elektryczne z ośmioma wirnikami.
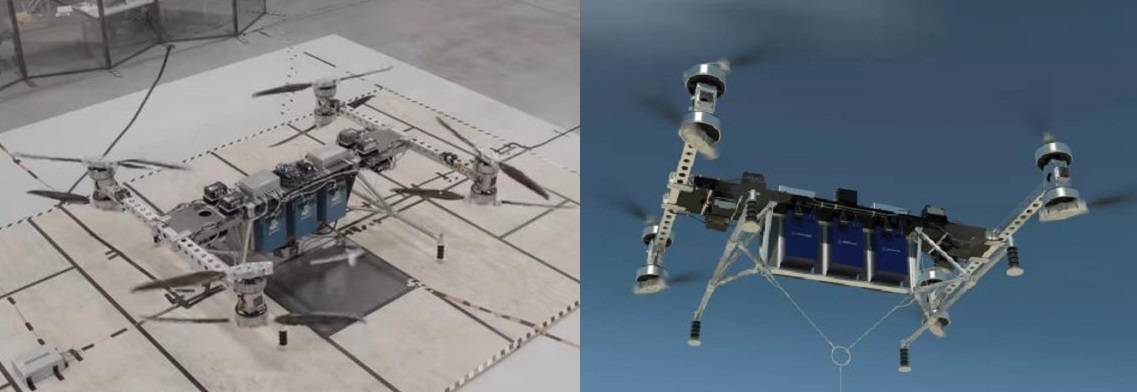
Quadrocopter cargo Boeing
Prezentacja quadrocoptera cargo Boeinga
Elektryczne quadkoptery-UAV mogą być skutecznym rozwiązaniem do wykrywania nisko lecących EOS dla naziemnych i morskich systemów obrony przeciwlotniczej.
Elektryczny quadkopter-UAV musi być umieszczony na pojeździe nośnym, należy tam również umieścić zespół generatora diesla (DGU), aby zapewnić UAV energię elektryczną. Niestety na chwilę obecną moc silników elektrycznych eksperymentalnego quadkoptera, czas ładowania akumulatora oraz czas lotu nie są znane.
Można rozważyć dwie opcje:
- w pierwszym wariancie brak baterii niezbędnych do utrzymania długiego lotu, zasilanie z pojazdu nośnego, jest tylko niewielka bateria zapasowa do awaryjnego lądowania UAV, przypuszczalnie ta opcja może być uznana za optymalną;
- druga opcja może być wykorzystana, jeśli masa kabla potrzebnego do dostarczenia wymaganej mocy do quadkoptera jest zbyt duża, w takim przypadku quadkopter powinien być wyposażony w akumulatory lub superkondensatory (jonizatory) z funkcją szybkiego ładowania.
Aby zapewnić ciągłość w powietrzu, cztery systemy obrony powietrznej krótkiego zasięgu wymagają co najmniej dwóch pojazdów nośnych z bezzałogowymi statkami powietrznymi. Czas spędzony przez UAV w powietrzu będzie ograniczony jedynie dostępnością paliwa dla DGU.
Zamiast elektrycznego quadkoptera można zastosować UAV oparty na silnikach tłokowych benzynowych lub wysokoprężnych. W Rosji opracowaniem i produkcją takich rozwiązań zajmuje się firma SKYF Technology, która oferuje klientowi BSP pionowego startu i lądowania SKYF. W tej chwili nośność UAV SKYF wynosi 250 kilogramów z perspektywą zwiększenia do 400 kilogramów. Wysokość lotu tego UAV wynosi do 3000 metrów.

Pionowy start i lądowanie UAV na benzynę
Demonstracja lotu UAV SKYF
Prezentacja UAV SKYF
Wcześniej Gorizont zaprezentował bezzałogowy statek powietrzny typu śmigłowcowego Horizon Air S-100 z wszechstronnym radarem, opartym na austriackim Schiebel Camcopter S-100. Wszechstronny radar Kolibri zamontowany na tym BSP, zainstalowany w dolnej części kadłuba, jest opracowywany wspólnie z Moskiewskim Naukowo-Badawczym Instytutem Radiofizyki. Całkowita masa sprzętu radarowego nie powinna przekraczać 6,5 kg, wymagany zasięg w trybie widzenia dookoła (zawis BSP) to co najmniej 200 km, w trybie apertury syntetycznej co najmniej 20 km.
Ładowność tego UAV jest zbyt mała (35 kg), aby pomieścić radar o akceptowalnych parametrach, ale może być interesująca jako koncepcja. Czas ciągłego przebywania w powietrzu to 6 godzin.

Helikopter typu UAV firmy „Horizon” z radarem dookólnym
Podane przykłady kwadrokopterów-UAV nie mogą być bezpośrednio wykorzystywane do rozmieszczania radarów, ponieważ mają stosunkowo skromną ładowność, ale nie ma wątpliwości, że ich konstrukcje będą aktywnie rozwijane i ulepszane. Przede wszystkim dotyczy to elektrycznych quadrocopterów-UAV.
Głównymi wymaganiami dla UAV AWACS typu quadrocopter lub UAV-AWACS typu śmigłowca powinna być wysoka niezawodność i możliwość długotrwałego przebywania w powietrzu, przy zapewnieniu określonych osiągów w locie (LTH), a także wysokich zasobów i niski koszt za godzinę lotu.
Bezzałogowe statki powietrzne na dużych wysokościach
W przypadku systemów obrony przeciwlotniczej dalekiego zasięgu bezzałogowy statek powietrzny do pionowego startu i lądowania nie będzie już skutecznym i wystarczającym środkiem rozpoznania, ponieważ wysokość radaru, aby uzyskać zasięg widzenia około 400 km, musi przekraczać 10 000 metrów.
Przypuszczalnie, jako latający radar dla systemów obrony powietrznej dalekiego zasięgu, można zastosować UAV o długim czasie lotu, typ samolotu, średnie lub duże wymiary.
Jeden z kandydatów do roli obiecującego warkot-DRLO może stać się UAV Altair o masie startowej 5 ton i ładowności 1-2 tony. Ten UAV powstaje w ramach projektu badawczego Altius-M w Biurze Projektowym Sokol (Kazań) wspólnie z firmą Transas. Czas lotu powinien wynosić do 48 godzin, zasięg lotu wynosi 10 000 km. W 2018 roku program Altair UAV został przeniesiony do Uralskich Zakładów Cywilnych lotnictwo„(UZGA). Testy w locie BSP Altair powinny rozpocząć się w 2019 roku.

Prototyp BSP Altair
Urządzenia tego typu są rozwijane w innych krajach. W szczególności chińska firma CETC opracowuje UAV JY-300. Urządzenie średniej wielkości powinno stać się nośnikiem anten konforemnych i służyć jako bezzałogowy AWACS. Według wstępnych danych JY-300 UAV ma masę startową około 1300 kg i może przenosić ładowność 400 kg. Jest w stanie latać do 12 godzin na wysokości do 7,6 km. Radary wbudowane w konstrukcję tego drona powinny umożliwiać wykrywanie celów powietrznych i morskich z dużych odległości.

Prototyp UAV AWACS JY-300 chińskiej firmy CETC
Rosyjskie UAV o średnich i dużych gabarytach borykają się z wieloma problemami, w tym brakiem kompaktowych, mocnych i ekonomicznych silników krajowych, brakiem nowoczesnej awioniki. Jednym z najważniejszych problemów jest brak szybkich satelitarnych kanałów transmisji danych o globalnym zasięgu, które umożliwiają sterowanie bezzałogowym statkiem powietrznym i odbieranie od niego informacji wywiadowczych z dużej odległości od bazy macierzystej.
Użycie bezzałogowych statków powietrznych AWACS o długim czasie lotu nie wymaga obowiązkowej obecności takich kanałów. Ogólnie rzecz biorąc, praca kombinacji systemów obrony przeciwlotniczej dalekiego zasięgu – długodystansowego bezzałogowca może wyglądać tak:
Bezzałogowy statek powietrzny dalekiego zasięgu AWACS startuje z lotniska i wchodzi w strefę patrolowania nad stanowiskami warstwowej obrony przeciwlotniczej. Wszystkie informacje z niego przesyłane są do operatorów systemów obrony powietrznej dalekiego zasięgu, a dalej, poprzez punkt kierowania walką, do operatorów innych systemów obrony powietrznej wchodzących w skład połączonego warstwowego systemu obrony powietrznej. Lot UAV powinien odbywać się w większości w trybie automatycznym po danej trajektorii. Jeden system obrony powietrznej dalekiego zasięgu powinien zawierać dwa AWACS. W takim przypadku mogą pełnić służbę bojową w systemie zmianowym nad pozycjami systemu obrony powietrznej przez 36-48 godzin, w zależności od oddalenia od macierzystego lotniska.
Wymagania dla UAV dalekiego zasięgu AWACS są takie same, jak dla UAV dla systemów obrony powietrznej krótkiego i średniego zasięgu - wysoki zasób operacyjny i niski koszt na godzinę lotu.
Może pojawić się pytanie: tytuł artykułu odnosi się do pracy systemów obrony powietrznej na nisko latających celach bez udziału lotnictwa Sił Powietrznych, a UAV o długim czasie lotu są wyraźnie związane z lotnictwem. Tutaj pytanie dotyczy raczej przynależności wydziałowej. W Stanach Zjednoczonych na mocy umowy Johnson-McConnell między armią a Siłami Powietrznymi śmigłowce nie należą do Sił Powietrznych i są bezpośrednio podporządkowane Armii USA, działają w jej interesie (podział samolotów w Stanach Zjednoczonych między Armia i Siły Powietrzne są dobrze napisane tutaj). Tak więc w naszym przypadku przynależność UAV do konkretnego systemu obrony przeciwlotniczej nie pozwoli na wykorzystanie go przez Siły Powietrzne do innych celów.
Warstwowa obrona powietrzna z UAV AWACS
Zastosowanie bezzałogowych statków powietrznych AWACS typu quadkopter oraz bezzałogowych statków powietrznych dalekiego zasięgu AWACS zapewni gęste pokrycie radarowe obszaru i umożliwi wyznaczanie celów pociskom z ARGSN i naprowadzaczem IR na maksymalnym zasięgu.
Przypuszczalnie dla dwóch systemów obrony powietrznej krótkiego zasięgu powinien być jeden pojazd z AWACS typu quadkopter lub dwa pojazdy dla czterech systemów obrony powietrznej. System obrony powietrznej średniego zasięgu powinien obejmować dwa pojazdy z AWACS typu quadrocopter. Dwa bezzałogowe statki powietrzne AWACS dalekiego zasięgu należy zaklasyfikować jako systemy obrony powietrznej dalekiego zasięgu.
W okresie zagrożenia lub w przypadku wybuchu działań wojennych bezzałogowe statki powietrzne dalekiego zasięgu muszą prowadzić ciągłe patrole nad pozycjami systemu obrony powietrznej. UAV typu quadrocopter, z zestawu systemów obrony powietrznej krótkiego i średniego zasięgu, muszą znajdować się na pojazdach przewoźnika w gotowości do natychmiastowego startu. W przypadku wykrycia zagrożenia z powietrza wystrzelenie bezzałogowego statku powietrznego typu quadrocopter powinno nastąpić w ciągu kilku minut.
Koszt samych UAV i czasu ich lotu jest tradycyjnie znacznie niższy niż koszt załogowych samolotów i śmigłowców, co czyni to zadanie atrakcyjnym ekonomicznie. Proponowana technicznie koncepcja również nie zawiera problemów nie do pokonania.
W przypadku obiektów nieruchomych o dużym znaczeniu można zastosować balony AWACS. W przypadku obrony przeciwlotniczej obiektów wyposażonych w balony AWACS, długodystansowe bezzałogowce nie są wymagane i mogą być wyłączone z systemów obrony przeciwlotniczej dalekiego zasięgu lub mogą być na lotnisku gotowe do startu jako zapasowe środki rozpoznania i celu Przeznaczenie.
UAV AWACS dla floty
Wcześniej rozważano jedynie wykorzystanie bezzałogowych statków powietrznych AWACS w interesie naziemnych systemów obrony powietrznej. Ale nie mniej, a być może ważniejszym zadaniem jest wykorzystanie bezzałogowych statków powietrznych typu quadkopter AWACS oraz bezzałogowców o długim czasie lotu w interesie obrony przeciwlotniczej okrętów wojennych. flota (Marynarka wojenna). Biorąc pod uwagę fakt, że nie mamy na nich lotniskowców, a tym samym samolotów AWACS, nowoczesne rosyjskie okręty są słabo chronione przed atakami z powietrza, niezależnie od rodzaju posiadanej obrony przeciwlotniczej, ze względu na fizyczne ograniczenia w zasięgu wykrywania niskich latające cele.
Zastosowanie bezzałogowych statków powietrznych typu quadrocopter na okrętach rosyjskiej marynarki wojennej znacznie przesunie granicę niszczenia celów nisko latających. A wysłanie bezzałogowych statków powietrznych o długim czasie lotu i zasięgu w rejon, w którym znajdują się okręty Marynarki Wojennej, da im dodatkowe możliwości rozpoznania sił wroga i wydawania oznaczeń celów dla pocisków bronie daleki zasięg.

Koncepcja brytyjskiego statku Dreadnought 2050 z bezzałogowym statkiem powietrznym połączonym ze statkiem kablem z nanorurek węglowych i kriogenicznie chłodzonym kablem nadprzewodzącym
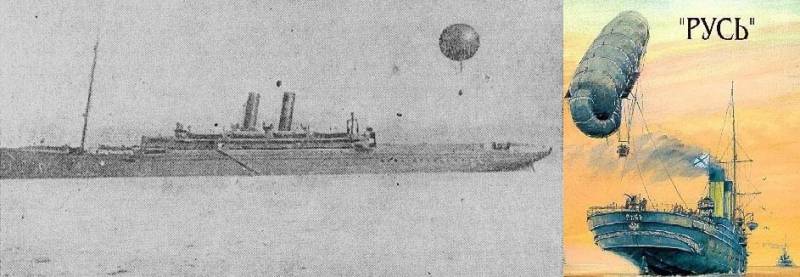
Nie można wykluczyć użycia balonów i sterowców AWACS w interesie Marynarki Wojennej, zwłaszcza że historyczny istnieją przykłady użycia balonów przez rosyjską flotę.
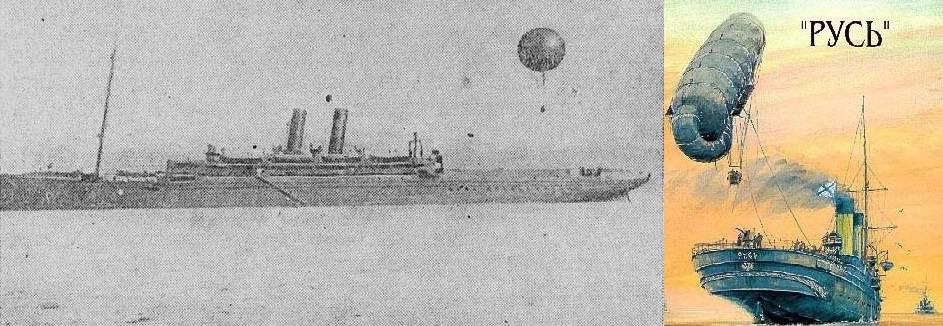
Krążownik „Rus” z balonem na uwięzi
odkrycia
Obrona powietrzna naziemna i naziemna bez możliwości atakowania celów nisko latających z dużej odległości zostanie pokonana.
Aby rozwiązać ten problem, w interesie systemów obrony powietrznej krótkiego i średniego zasięgu, konieczne jest stworzenie bezzałogowego statku powietrznego typu quadrocopter AWACS, najlepiej z zasilaniem kablem z pojazdu nośnego.
W przypadku systemów obrony powietrznej dalekiego zasięgu konieczne jest zintensyfikowanie rozwoju BSP dalekiego zasięgu AWACS.
W przypadku obiektów nieruchomych o dużym znaczeniu można zastosować balony AWACS.
Wszystkie powyższe systemy (bezzałogowce AWACS typu quadkopter, długodystansowe bezzałogowe statki powietrzne AWACS i balony AWACS) mają ogromne znaczenie dla poprawy skuteczności i przetrwania nie tylko naziemnych systemów obrony powietrznej, ale także okrętów Marynarki Wojennej Rosji.
informacja